<Autosax>
an automated microtonal C-melody saxophone
by Godfried-Willem Raes

1989-2021
Autosax
This instrument is an automated and computer controlled acoustical
saxophone. It is one of the very first automated instruments we designed and
its building history went through five very distinct phases, each realizing
a different approach to the problems posed by properly automating a saxophone.
In the very first version (1989), the sound production relied on computer controlled
acoustical feedback in the bore of the instrument. This version was dropped
for the response was sluggish and the pitch produced quite unreliable. Although
the concept behind the design was sound, the possibilities for real time processing
of the feedback loop were way below the requirements.
The second version used a compression driver driven by a frequency
synthesizer. This version was evaluated as very reliable, but soundwize, far
away from anything like a realistic and convincing saxophone sound. The feedback-mechanism
was preserved as well. A laptop computer was used to controll all the hardware
built into the instrument. The parallel port (the printer port) was used for
communication and control.
The thirth version (2007) used a quite sophisticated automated
reed mechanism. The sound was indeed very good and it was also capable of producing
a wealth of multiphonics, slaptongues and other special effects. The sound production
was realized through an acoustical but computer controlled two-phase reed mechanism
using a radial compressor for the wind supply and a fast regulating conical
valve for expression control. This version was dropped in 2009 mainly because
the ambitus was limited to the lowest octave. The range below the 'normal' range
actually sounded best and hence we extended it in the Midi support down to midi
note 0. However, we never got the instrument to overblow properly and reliably...
The new sounds the mechanism could produce were a bonus, but quite unrelated
to the saxophone itself. For this reason, we decided to save the sound production
mechanism for a future project and maybe a novel instrument.
The fourth version took of shortly after our quite successful
realizations of brass instruments (<Korn> the
cornet, <So> the sousaphone, <Heli>
the helicon and <Bono> the trombone) as well as
<Ob> the automated oboe, making use of acoustical
impedance converters driven by a compression driver and a capillary conduct.
For this version we carried out many experiments using acoustic impedance converters.
In a first design we made the acoustic impedance converter such as to mimic
as well as possible the behavior of the original mouthpiece with reed. Thus,
instead of using a circular capillary channel driving the saxophone, we used
a small slit. The whole construction was made from massive staff brass material
on the lathe, the slit filed out manually. A quite inexplicable side effect
of applying this construction to the saxophone, was that it lowered the whole
tuning of the instrument by a minor thirth. Thus the C-melody saxophone came
to behaves like an A instrument. In the last and most successfull experiment
so far, we used a regular capilary again, but with a much reduced traject as
compared to the first version. The saxophone now behaves again as a C instrument...
The instrument is controlled via MIDI, but UDP/IP controll was implemented as
well. It used 3 PIC microcontrollers, one of which was a dsPic30F3010 type used
for the reed control, the tuning and the intonation, the other ones taking care
of the keys and the third one controls the volume and the feedback levels as
well as some visual features of the robot.
The fifth version (2020) preserves the membrane compressor drive
from version 4, but the excitation of the compressor as well as the key mechanism
was completely redesigned. The improvements on the key mechanism served to greatly
silencing the mechanical noises produced by the keys in all previous versions.
The keys now have a soft-release mechanism using two 18F2620 PIC processors.
The bulbs in series with the solenoids were preserved, although we changed the
type of bulb used here. The driver for the membrane compressor now uses two
24EP128MC202 16-bit PIC processors, one charged with all amplitude modulation
tasks, the other with excitation wave control. The algorithm to calculate the
excitation wave required, takes profit from the latest discoveries in our lab,
first applied and experimentally verified in our <Flut>
robot. The midi-hub board was preserved from version 4.
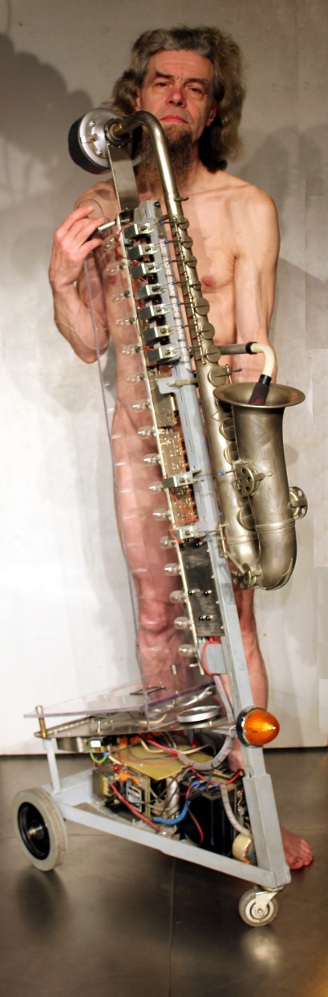
The lightbulbs -clearly visible on the picture- are not just
a visual feature but serve as voltage dependent resistors in series with the
solenoid valves controlling the keys, thus preventing overheating of the coils
when many keys are opened and stay opened for a long time. Different and non
standard fingerings can be applied.
The normal note range is 46 to 77, but due the possibilities of the reed mechanism,
we provided in an extended range in the low end, descending down to even as
low as midi note 24. Of course users should not expect a realistic C-melody
saxophone sound from this range as resonance in the bore of the instrument will
be minimal. We observed that for the 'imaginary' range 34 to 45 the sound is
nevertheless quite good, this being due to the strong octave harmonic in the
spectrum of the saxophone. The sounds produced in this extended range below
34 are far too interesting -although not as good as those produced in the thirth
version of the robot- to leave them out of the range of possibilities. High
notes are implemented up to midi note 89, but again, in this range users should
not expect much realism.
The development of this automated saxophone took us some 30 years and <Autosax>
has known 5 different working realizations in its history. We are now, beginning
2021, at version 5.
Midi implementation:
- midi note range 24-90 (normal range 46-77)
- the release byte, with a note-off command, steers the release time. This
overrides controller 19.
- the velocity byte steers the sustain level.
- controller 1: Wind noise [default = 48]
- controller 3: Vibrato depth [deault = 8]
- controller 4: vibrato speed [default = 94]
- controller 5: tremolo depth [default = 4]
- controller 6: tremolo speed [default = 20]
- controller 7: volume control - global volume controller [default = 96]
- controller 13 - select alternative fingering lookup
tables [for research only]
- controller 15 - ADSR time scaling [default = 20]
- controller 16 - attack time controller [default = 36]
- controller 17 - attack level controller [default = 100]
- controller 18 - decay time controller [default = 32]
- controller 19 - release time controller [default = 80]
- controller 20 - tuning [default= 64, for A=440Hz]
- controller 40,41,42,43: wave-lookuptables [ for research
only]
- controller 66: sound generator on/off switch
(if off, no sound will be produced)
- controller 80: dynamic scaling (20dB - 30dB - 40dB - 50dB - 60dB) [default=
64, for 40dB range]
- program change: no longer implemented. Disregarded by the robot.
- key pressure: used for different fingerings during
a produced sound.
- channel aftertouch: not implemented
- pitch bend: range 1 semitone (-50 to + 50 cents) [note that pitch-bend must
follow a note-on]
-
- lights: mapped on notes in the range 121-127.
- note 121: blue light circuitry base left
- note 122: blue light circuitry base right
- note 123: yellow LED strip backside
- note 124: yellow LED strip upper part saxophone
- note 125: red, to be mounted
- note 126: red, to be mounted
- note 127: frontal orange light, velo byte controls strength
- Midi Channel: 4 (1-16) or 3 (0-15)
-
-
Compositions for <Autosax>
- Kristof Lauwers "Sphk", for autosax solo, premiered on august
12th, 2002, M&M concert, Ghent, Logos Tetrahedron
- in this piece, the instrument is used in audiofeedback mode only. Thus
it requires Autosax version 2. Available on CD LPD012.
- Godfried-Willem Raes "Lyrics", for autosax solo, 2001 (Autosax
version 3)
- Godfried-Willem Raes "GeroSax", for autosax and invisible instrument,
2003 (Autosax, versions 2,3,4)
- Sebastian Bradt "Solosax" (2009)
- Godfried-Willem Raes "Kruiswals" (2020) (Autosax version 5)
Compositions where <Autosax> is an important
member of the robot orchestra:
- Godfried-Willem Raes "Shifts for M&M"
- Godfried-Willlem Raes "TechnoFaustus: Tekne"
- Godfried-Willem Raes "Technofaustus: Lithos"
- Godfried-Willem Raes "HaviSax", for harma, vibi and autosax, 2002
- Godfried-Willem Raes "Vivoges", 2003
- Jelle Meander "Amorgos", 2004
- Godfried-Willem Raes "TransiTrance", 2005
- Godfried-Willem Raes "Namuda Studies", 2010-2020
- Godfried-Willem Raes "Slones", 2012
- Godfried-Willem Raes "Linac Elekta", 2020-2022
|
Collaborators: Kristof Lauwers, Johannes Taelman, Lara Van Wynsberghe.
Technical specs (for organizers):
- Weight: ca. 40 kg
- Base sizes: 600 x 400 mm
- Height: 1600mm
- Power: 230V/ac - 680W peak.
- Control: MIDI in, 5x MIDI thru.
- Audio in/out: 0dB line level.
- The instrument should be transported in its protective case.
- Insurance value: 14.000 Euro (Version 5)
|
<Autosax>
 Reeds verschillende
jaren vormde het ding niets meer dan een dekoratief onderdeel van mijn elektronische
werkplaats bij Stichting Logos. Ik had het op een gewone en dus regenachtige
zaterdagochtend in 1989 gezien op de Gentse rommelmarkt, en herinner me nog
hoe ik het - nog voor ik goed en wel besefte wat het eigenlijk was- reeds goed
en wel in mijn bezit had gekregen. Eens thuis onderwierp ik de buit aan een
nauwgezet onderzoek. Op het eerste gezicht leek het verraderlijk sterk op een
tenorsaxofoon, maar de kleppen waren niet voorzien van plaatjes voor vingers.
Alle hefbomen hadden integendeel een klein zijwaarts geboord gaatje. Het kon
niet anders dan afkomstig zijn van een of andere grote orkestrion. Het klankopwekkingsmekanisme
ontbrak echter, en ik vermoedde toen dat dit uit een pneumatisch gestuurd tongwerk
moet hebben bestaan. Hoewel, sommige orkestrions omvatten instrumenten die weliswaar
mee bewegen met de muziek, maar helemaal niet klinken en dus een louter vizuele
funktie hebben (de inferieure Decap's bvb.). Vele jaren later werd dit vermoeden
trouwens ook door de historische feiten bevestigd, toen het instrument afkomstig
bleek uit een wat dekadent en kitscherig dansorgel van Grymonprez uit Ledeberg
bij Gent... Ik herinnerde me nog mijn pogingen er een autentiek tenorsaxofoonmondstuk
op gemonteerd te hebben. De toonladder was kromatisch en redelijk korrekt. Er
was een klep voor elke kromatische halve toon. De speelbaarheid was door die
zuiver lineaire vingerzetting evenwel bijzonder problematisch, niet alleen door
het ontbreken van de steuntjes voor de vingers, maar bovenal door de onmogelijk
te grijpen afstanden tussen de diverse hefbomen onderling. Ik schoof het ding
voorlopig terzijde, wel beseffende dat er wel iets originelers mee aan te vangen
zou zijn, dan het terug te brengen tot een of andere vorm van de bekende tenorsax.
Reeds verschillende
jaren vormde het ding niets meer dan een dekoratief onderdeel van mijn elektronische
werkplaats bij Stichting Logos. Ik had het op een gewone en dus regenachtige
zaterdagochtend in 1989 gezien op de Gentse rommelmarkt, en herinner me nog
hoe ik het - nog voor ik goed en wel besefte wat het eigenlijk was- reeds goed
en wel in mijn bezit had gekregen. Eens thuis onderwierp ik de buit aan een
nauwgezet onderzoek. Op het eerste gezicht leek het verraderlijk sterk op een
tenorsaxofoon, maar de kleppen waren niet voorzien van plaatjes voor vingers.
Alle hefbomen hadden integendeel een klein zijwaarts geboord gaatje. Het kon
niet anders dan afkomstig zijn van een of andere grote orkestrion. Het klankopwekkingsmekanisme
ontbrak echter, en ik vermoedde toen dat dit uit een pneumatisch gestuurd tongwerk
moet hebben bestaan. Hoewel, sommige orkestrions omvatten instrumenten die weliswaar
mee bewegen met de muziek, maar helemaal niet klinken en dus een louter vizuele
funktie hebben (de inferieure Decap's bvb.). Vele jaren later werd dit vermoeden
trouwens ook door de historische feiten bevestigd, toen het instrument afkomstig
bleek uit een wat dekadent en kitscherig dansorgel van Grymonprez uit Ledeberg
bij Gent... Ik herinnerde me nog mijn pogingen er een autentiek tenorsaxofoonmondstuk
op gemonteerd te hebben. De toonladder was kromatisch en redelijk korrekt. Er
was een klep voor elke kromatische halve toon. De speelbaarheid was door die
zuiver lineaire vingerzetting evenwel bijzonder problematisch, niet alleen door
het ontbreken van de steuntjes voor de vingers, maar bovenal door de onmogelijk
te grijpen afstanden tussen de diverse hefbomen onderling. Ik schoof het ding
voorlopig terzijde, wel beseffende dat er wel iets originelers mee aan te vangen
zou zijn, dan het terug te brengen tot een of andere vorm van de bekende tenorsax.
Het ding was dus al meer dan een jaar naar het hinterland van mijn onderbewustzijn
verhuisd, toen op een - alweer- bijzonder regenachtig novemberweekend in 1990,
ik het ding ter hand nam en begon aan de konstruktie van een volautomatische
komputergestuurde saxofoon. Hoewel we het aanvankelijk hadden beschouwd als
een tenorsax, bleek bij nadere studie van de voortgebrachte tonen, het toonbereik
te beginnen vanaf Bb (midi 46). Dat maakt dat het instrument eigenlijk volledig
gemensureerd is naar de -zeldzame- C-melody saxofoon uit het interbellum. Hier
is er eentje: 
Voor de automatische sturing van de kleppen op het instrument -dat leek me
het eenvoudigste deel van het ontwerp- maakte ik dankbaar gebruik van de voorraad
elektromagneten die ik ooit kreeg van mijn Amerikaanse vriend - overigens ook
een uitstekend komponist en instrumentenbouwer - Alec Bernstein. Deze elektromagneten
werden oorpronkelijk gemaakt voor gebruik in een piano-'Vorsetzer' van de firma
Maranz, die evenwel over de kop ging. Alec was zo slim, de hele fabrieksvoorraad
in te kopen..., slim, vooral omdat de hele voorraad op die wijze uiteindelijk
bij mij belandde.
De kern van deze spoelen bestaat uit een cilindrisch
stuk ferriet met een ingetapt uiteinde. Hiervoor maakte ik aluminium oogjes
waardoorheen veerstalen haakjes voor de overbrenging op de kleppen konden aangebracht
worden. De werkspanning van de spoelen is berekend op 170Volt D.C. , overeenkomstig
rechtstreeks gelijkgerichte en afgevlakte Amerikaanse netspanning. Aan 0.5A
per bekrachtigde spoel, betekent een en ander een (teoretisch) maximaal opgenomen
vermogen van omstreeks 1kW! Anders dan bij player- pianos immers, worden bij
blaasinstrumenten heel normaal veel kleppen tegelijkertijd bekrachtigd. In mijn
ontwerp echter kwam het erop neer dat de zaak algauw gloeiend heet liep... Om
dit euvel - dat destruktieve gevolgen had kunnen hebben - te verhelpen, bouwde
ik een speciale sturing voor de elektromagneten gebruik makend van pulsbreedte-gemoduleerde
gelijkspanning. Ook voor de uitsturing van de nodige signalen (spoelen aan/uit
en pulsbreedte van de bekrachtigingsspanning), bleek komputersturing een vereiste.
Het klankmechanisme dat ik er aanvankelijk voor bedacht, berustte op zuiver
akoestische maar komputer-gestuurde feedback in het instrument zelf. Daartoe
monteerde ik op de plaats van het mondstuk een luidsprekermotor (een hogedrukkamer
of membraankompressor) en in de klankbeker een mikrofoon. Door sturing van de
versterkingsfaktor en door toepassing van filters in het tussen beide opgenomen
elektronisch netwerk, bleek het mogelijk alle tonen vrij realistisch te produceren.
Alleen de aanspreeksnelheid van de diverse noten liet wel nogal wat te wensen.
Om dit te verbeteren, plaatste ik dan in de eerste versie 6 verschillende miniatuur
elektretmikrofoontjes bij de diverse toongaten. Als nu de mikrofoontjes geschakeld
en onderling gemengd konden worden in funktie van de te produceren tonen, dan
was het doel virtueel bereikt. Daarvoor moest evenwel noodzakelijkerwijze alweer
op komputersturing beroep gedaan worden. Dit, onder meer omdat de feedbackregeling
bijzonder snel dient te gebeuren, a rato namelijk van zo'n 100 instellingen
en instrukties per sekonde. Traag voor een komputersturing, maar beslist te
snel voor de manuele bespelingsmogelijkheden van musici, zeker wanneer die via
instelknopjes en schakelaars zou dienen te gebeuren. In een eerste uitvoering
bouwden we voor de klankopwekking een behoorlijk komplekse schakeling met 6
bandfilters (een per mikrofoon) gevolgd door VCA's. De VCA's werden opgebouwd
met 8-bit DAC's waarvan evenwel slechts 4 bits werden benut, de overige bleven
op die wijze vrij voor de kanaalselektie en de adressering. Een enkel byte kon
zo volstaan voor de kontrole van de feedback loop en dus van de klankopwekking
zelf. Een zekere traagheid in het aanspreken van de diverse noten bleef evenwel
ook in dit ontwerp helaas aanwezig, maar m.i. was dit vooral te wijten aan het
beperkte vermogen van de gebruikte luidsprekermotor (15 Watt). Met een piekvermogen,
gedurende het aanzetten van de toon in de orde van 100 Watt zou allicht een
beter resultaat op dit vlak kunnen bereikt worden. Ook kon het nogal eens gebeuren
dat een andere noot dan de voorziene werd geproduceerd. Omgevingsgeluid speelde
daarbij een belangrijke rol, wat uiteraard de opname in een orkestrale kontekst
kompromiteerde. Onbevredigd door de resultaten van versie 1, herbouwden we in
2002 de stuurschakeling voor <Autosax> volgens een geheel nieuw ontwerp,
waarbij de feedback sturing geheel in software werd gerealiseerd. De -frekwentieselektieve
en aan het toonbereik van de saxofoon aangepaste voorversterker voor de voor
het paviljoen gemonteerde elektret mikrofoon kwam eruit te zien zoals op de
afbeelding opgenomen in het bouwdagboek. Feedback sturing via een digitaal stuurbare
versterker-mixer schakeling bleef ook in deze tweede versie een optie voor deze
robot.
Voor de komputersturing had het zo ontstane instrument voldoende aan 2 bytes
voor de sturing van de spoelen/kleppen, naast het ene byte voor de feedback-kontrole.
Dit kon gemakkelijk geimplementeerd worden via de op zowat alle komputers beschikbare
parallel-printerpoort. Hiervoor gebruikten we hetzelfde demultiplex board zoals
we dat ook ontwikkelden voor automaten zoals <Klung>,<ThunderWood>,
<Troms> enzomeer. Omdat elk individueel bit via software kan gemanipuleerd
worden, blijkt het perfekt mogelijk ook mikro-intervallen, vorkgrepen, kleppengerammel,
multiphonics door het instrument te laten voortbrengen. Ook 'zingen en spelen'
tegelijkertijd is makkelijk te voorzien, door een vokaal (eventueel vanuit een
stemsynthesiser ofwel vanuit een sampler) signaal in het mixergedeelte bij de
mengen.
Om de responstijd te versnellen, het zwakke punt
van het gehele ontwerp, zowel in de eerste versie als ook in de tweede, stuurden
we in de tweede versie van <Autosax> bij elke aan te sturen toonhoogte
een korte uitstervende sinus in de mixer. Hoewel dit op het eerste gezicht een
'overtreding' lijkt te zijn van het anderszins zo akoestische werkingsprincipe
van het instrument, is het toch zo dat ook een speler van vlees een bloed wel
degelijk anticipeert op de te spelen noot, wil hij deze tenminste trefzeker
en goed aan zijn instrument ontlokken. In dit geval was echter in de komputerimplementatie
nood aan het gebruik van het audiosubsysteem: de ingebouwde soundcard van de
PC. Aan de hardware hoefden voor dergelijke uitbreiding geen wijzigingen te
worden aangebracht. Overigens kon hiervoor ook een externe gewone midi-synthesizer
worden gebruikt.
Hoewel Autosax in deze versie verscheidene jaren deel uitmaakte van het <M&M>
robotorkest, waren we toch niet echt gelukkig met het voortgebrachte geluid.
Het klonk me veel te sintetisch, elektronisch en eendimensioneel. In 2005 en
2006 onderging <Autosax> daarom een derde welhaast volledige herziening
(versie 3) , waarbij volledig afgezien werd van het oorspronkelijke feedbackmechanisme,
maar waarbij we integendeel poogden het riet zelf onder mikroprocessor kontrole
aan het trillen te brengen. Heel wat research staken we in de ontwikkeling van
het riet zelf en de aansturing (cfr. bouwdagboek). Uiteindelijk werd het een
samengesteld riet, deels uit riet deels uit staal. Het grote probleem bleek
de bouw van een riet dat redelijk lineair aan het trillen kan worden gebracht
over een breed frekwentiegebied. Een erg lage eigenfrekwentie bleek noodzakelijk.
Voor de kontrole daarvan deden we beroep op de DS-PIC microcontroller van MicroChip.
Om een redelijk ' menselijke' kontrole mogelijk te maken van de toonvorming
ontwikkelden we een speciaal kegelventiel. Hiermee wordt een werkelijke artikulatie
van de voortgebrachte klanken mogelijk. De resultaten die we bereikten met dit
mechanisme waren werkelijk verbluffend, vooral dan in de laagte, ver onder de
tessituur waarvoor het instrument normaal is voorzien. Prachtige slagtongues
en multiphonics. Alleen, overblazen naar het eerste normaal oktaaf bleek uiterst
onbetrouwbaar en problematisch, zeker wanneer daar ook nog amplitude variatie
bij verwacht werd. In 2009 beslisten we dan ook het hier toegepaste mechanisme
geheel te verwijderen en opzij te leggen voor gebruik in een nieuwsoortige te
ontwikkelen automaat die dan niks met een saxofoon te maken zou hoeven te hebben.
Versie vier, ontwikkeld in 2009, bouwt verder op de positieve ervaringen opgedaan
bij de bouw van de koperblaasrobots <Korn>, <Bono> en <Heli>
evenals van het dubbelrietinstrument <Ob>, de automatische hobo. Hier
werden systematisch akoestische impedantietransformatoren toegepast. In tegenstelling
tot die ontwerpen echter, waarvoor een kapilair met ronde doorsnede wordt toegepast
voor de koppeling aan het mondstuk, bouwden we hier eerst een konvertor voorzien
van een spleet, overeenkomstig de excitatie door een enkelriet. Hierdoor verschoof
evenwel de gehele stemming van het instrument met een terts naar omlaag. Een
echt sluitende verklaring voor dit fenomeen hebben we niet. Ook de efficientie
werd wel heel erg klein. Een betere versie werd gebouwd, met een korter kapilair
trajekt en weer een kleine maar ronde opening. De stemming was weer korrekt
en de efficientie heel wat beter.
In 2020 begonnen we met versie 5: te verbeteren aspekten waren eerst en vooral
het storende geluid van de kleppen en in tweede instantie de kwaliteit van het
voortgebrachte geluid. De nieuwe ontwerpen werden uitgevoerd in de corona-maanden
maart en april van 2020. Versie 5 is speelklaar.
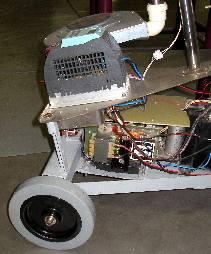
De <Autosax> zoals ik het instrument heb gedoopt, werd opgebouwd als
een vrijstaande ruimtelijke robot-skulptuur: als een saxofoon in speelklare
positie, maar zonder speler. Daartoe werd het instrument op een gelast statief
voorzien van talloze beugeltjes voor de vele elektromagneten, de elektronische
stuurschakelingen en de diverse voedingen en interfaces geplaatst. Het werkende
instrument werkt dan ook vizueel bevredigend: alle schakelingen zijn transparant
en zichtbaar zodat het niets verhult. Een naakte automaat, de eerste van wat
veel later een heel groot orkest zou gaan worden.
Godfried-Willem RAES, 1989-2021
|
Medewerkers: Kristof Lauwers, Johannes Taelman, Lara Van Wynsberghe
Technische specifikaties (voor organisatoren):
- Gewicht: ca. 40 kg
- Basis oppervlak: 600 x 400 mm
- Hoogte: 1600mm
- Opgenomen vermogen: 230V/ac - 680W peak.
- Aansturing: MIDI in, 5x MIDI thru.
- Het instrument moet verpakt worden getransporteerd
- Verzekeringswaarde: 14.000 Euro. (bouwkost)
|
Bouwgeschiedenis en bouwdagboek
Autosax onderging in de loop van zijn ontwikkeling tot nu toe vijf onderscheiden
stadia die elk met een werkende robot werden afgesloten. De globale ontstaansgeschiedenis
en de technische details daarvan worden in volgend dagboek gedokumenteerd.
- 11.1989: aankoop van een wat vreemde saxofoon op de Gentse rommelmarkt.
Het instrument, zo bleek later uit opzoekingswerk, was afkomstig van de afbraak
van het Grymonprez dansorgel in de feestzaal aan de Brusselse steenweg in
Ledeberg, bij Gent. Verder onderzoek wees uit dat het weliswaar op het front
van het dansorgel was gemonteerd en dat de kleppen bewogen, maar eveneens
dat het helemaal geen akoestisch geluid voortbracht. Net zoals bij de latere
Decap orgels uit de vervalperiode van het bedrijf was dit element dus geheel
fake. Er stak een omgebouwd Hammond orgel met luidsprekers achter...
- VERSION 1:
- 11.1990: Start bouw <Autosax>. Ontwerp vertikale kolom en selektie
Maranz elektromagneten. Laswerk magneetdragers in gewoon staal. Daarmee kon
de saxofoon nu alvast in positie worden gehouden.
- 01.1991: Laswerk onderstel op drie wielen. Experimenten met de toonvorming.
Montage van de elektromagneten.
- 09.1992: Montage scheidingstransfo en analoge eindversterker, met een ILP
30W module (HY30). Voeding 2x12V, toroidale transfo..

- 10.1992: bouw en ontwerp mikrofoonvoorversterker- en filterschakelingen.
Montage feedback mikrofoon. (Elektret type).
- 02.11.1996: Om de komplexiteit van PWM sturingen te vermijden bedachten
we voor de klepsturing een schakeling waarbij de spoelen bij het aanschakelen
met een sterke stroomstoot (170V,0.5A) bekrachtigd worden terwijl de spanning
daarna op de minimale houdspanning wordt begrensd. Dit kon eenvoudig worden
bereikt door de spoelen op te nemen in de ontlaadkarakteristiek van een kondensator,
waarbij de laadweerstand zo wordt berekend dat de minimale houdspanning (ca.
60Volt) bij ingeschakelde spanning niet boven de vereiste waarde uitkomt.
Berekeningen brachten ons op een weerstandswaarde van 620 Ohm. Het in deze
weerstanden te dissiperen vermogen beliep evenwel 20Watt... Met alle spoelen
bekrachtigd zou het instrument werken als een soort elektrische kachel. Daarom
bedachten we een andere oplossing die bovendien nog een leuk vizueel effekt
oplevert: in plaats van de dure gecementeerde vermogensweerstanden gebruikten
we uiteindelijk gewone klassieke en goedkope 60Watt - 230Volt gloeilampen.
Dit leverde ons bovendien nog een hoogst welkome stroomregeling op. Immers
de weerstand van een gloeilamp is een funktie van de temperatuur van de gloeidraad.
Zo is de koudweerstand van een 60Watt lamp ca. 70 Ohm, terwijl deze weerstand
bij volle spanning oploopt tot 884 Ohm! Een regelbereik van meer dan een decade
dus. Bij de in ons ontwerp aangelegde spanning van 170V branden de lampen
op een heel wat lagere temperatuur en bleek hun weerstand ca. 640 Ohm te bedragen.
Perfekt geschikt dus voor onze toepassing. Als schakelement gebruikten we
darlingtontransistoren geschikt voor de hier toegepaste relatief hoge spanning.
Aangezien de dissipatie in deze toepassing beperkt is, konden we de koelvinnen
geheel achterwege laten.
- 06.11.1996: Bouw feedbackschakeling volgens volgend ontwerp:
- 15.11.1996: eerste versie van Autosax operationeel en voor het eerst publiek
gedemonstreerd.
 De foto toont deze eerste versie van de werkende <Autosax>. De darlingtons
werden vervangen door IRF610 mosfets voorzien van een kleine koelvin..
De foto toont deze eerste versie van de werkende <Autosax>. De darlingtons
werden vervangen door IRF610 mosfets voorzien van een kleine koelvin..
- 15.08.2002: Toevoeging van een inox beschermkap tevens dienstig als drager
voor de besturings notebook komputer.
- 18.02.2002: De sturing van <Autosax> kan nu gebeuren door aansluiting
op een standaard printerpoort, via National Instruments DIO cards en PCMCIA
kaarten, maar ook via een gewone USB poort op een Wintel laptop PC. De PC
moet wel over een ingebouwd audiosubsysteem van een redelijke kwaliteit beschikken.
- 19.02.2002: Sedert het oorspronkelijke ontwerp, teruggaand tot 1989 hoewel
de eerste werkende opbouw slechts in 1991 werd uitgevoerd en afgewerkt, is
de komputer technologie uiteraard niet stil blijven staan. Real time audioprocessing
is inmiddels tot de standaard mogelijkheden van een gewone PC gaan behoren.
Hierdoor kon het oorspronkelijke ontwerp van de Autosax op hardware vlak aanzienlijk
vereenvoudigd worden. De kleppen-sturing werd behouden, maar de mogelijkheden
van de PC voor de sturing van de feedbackloop en dus de toonvorming van de
autosax zelf, kon nu helemaal in software geimplementeerd worden.
- VERSION 2:
- xx.xx.2002: bouw tweede versie van Autosax, met feedbacksturing volledig
in software onder GMT.
- 10.05.2002: Een inschakelbeveiliging met pincode decoder werd opgebouwd
en toegevoegd volgens volgend ontwerp:
 Deze
schakeling levert meteen ook de nodige spanningen voor de mikrofoonvoorversterkerschakeling.
Deze
schakeling levert meteen ook de nodige spanningen voor de mikrofoonvoorversterkerschakeling.
- 12.05.2002: Voor de sturing van de membraankompressor, gebruikten we de
reeds bestaande ILP30 versterkermodule met een eigen voeding (2x12V, symmetrisch).
Ingangen en uitgangen van het audiogedeelte werden allen genormaliseerd voor
0dB signaalnivoos.
- 27.05.2002: eerste publiek koncert met deelname van Autosax in versie 2.
 De foto werd genomen op dit koncert.<Autosax> wordt er bespeeld met
een subnotebook komputer gebruik makend van het USB interface.
De foto werd genomen op dit koncert.<Autosax> wordt er bespeeld met
een subnotebook komputer gebruik makend van het USB interface.
- 12.08.2002: premiere van Kristof Lauwers stuk voor autosax, waarbij deze
uitsluitend in feedback mode werkt.
- 10.05.2003: problemen met het Windows besturingssysteem duiken op. Het audio
systeem werkt niet meer deugdelijk onder de nieuwste versies van Windows...
- 12.07.2004: Onbevredigd door de resultaten van het bestaande en werkende
ontwerp, begon ik een hele reeks experimenten rond de bouw en aansturing van
een echt riet en saxofoonmondstuk, waarbij het gehele met traagheid geplaagde
feedbackmechanisme zou kunnen komen te vervallen. We waren aan versie 3 toe...
- VERSION 3:
- 22.08.2005: uitwerking ontwerp en experimenten rond de bouw van een nieuw
automatiseerbaar mondstuk met riet.
- 23.08.2005: Een hele reeks experimenten werd opgezet rond de mogelijkheid
en de voorwaarden gesteld aan een automatiseerbaar riet gemonteerd op een
origineel monstuk voor een tenorsaxofoon. Om de problemen met de bij normaal
menselijk spel noodzakelijke lipdrukregeling op het riet te omzeillen, kwamen
we er uiteindelijk toe het gehele werkingsprincipe om te keren. Bij een normaal
enkelrietinstrument (klarinet, saxofoon) is er in rust tussen de punt van
het riet en het mondstuk , aan het eind van de baan, een vooropening in maat
varierend tussen ca. 1mm en 3mm. Wanneer zacht en zonder lipspanning geblazen
wordt, krijgen we dan ook een luchtstroom (zonder toon, maar alleen met ruis)
doorheen het instrument. Pas wanneer we de lipspanning vergroten, wordt de
vooropening verkleind en kan een toon ontstaan, mits voldoende winddruk wordt
toegevoerd. In onze uitvoering is het riet in rust nagenoeg volledig tegen
de (vlak uitgevoerde) baan van het mondstuk aangelegd. Hoe hoog ook de toegevoerde
winddruk is, er zal nooit een luchtstroom doorheen het instrument kunnen ontstaan,
integendeel hoe groter de winddruk hoe harder het riet tegen de baan wordt
gedrukt. Het riet opent zich pas wanneer het door de elektromagneet wordt
aangetrokken. De mate waarin dit gebeurt kan nu elektronisch worden geregeld.
Het snel opwekken van de juiste en gewenste toonhoogte eveneens. Opdat dit
mogelijk zou zijn, dienden we natuurlijk eerst een rietkonstruktie te bedenken
die zich leent voor elektromagnetische aansturing. Experimenten met geheel
uit staal gemaakte rieten leverden een weinig overtuigende toon op (leek meer
op een klakson...) en zo kwamen we ertoe het riet op te bouwen uit een heel
dun stalen blad (gesneden uit 0.1mm dikte, precisie Hassberg meetlint, breedte
25mm) over de gehele rietlengte in kombinatie met een sterk ingekort klassiek
riet, dat hier wel degelijk meetrilt en als proportionele aandrukveer fungeert.
Belangrijk is de resonantiefrekwentie van het niet (akoestisch gezien een
staf ingeklemd aan een uiteinde) zo laag mogelijk te nemen. Aan de ondergrens
hebben we de beperking dat een heel lage resonantiefrekwentie een erg dun
riet impliceert en dat dit ten koste gaat van de maximaal haalbare geluidsterkte.
Het omgekeerde is evenwel ook mogelijk: een resonantiefrekwentie ver boven
de hoogste te produceren toon, maar dan hebben we wel heel erg grote hoeveelheden
energie nodig om dergelijk dik stalen riet nog te laten over en weer zwiepen.
De tekening moge het verschil tussen het normale riet en het mondstuk waartoe
wij kwamen voor dit soort automaat illustreren:
De gehele konstruktie werd in een cylinder van polycarbonaat met gelaste
inox deksels en aansluitingen voor enerzijds de saxofoon, anderzijds de
kompressor en de elektrische aansluitingen, ingebouwd. De elektromagneet
werd op een geveerde en verstelbare slede gemonteerd voor een makkelijke
mechanische afregeling. De foto hieronder toont twee komponenten van het
mechanisme in hun korrekte positionering:
De slede voor de elektromagneet werd gemaakt in spuitgietaluminium. Het
diende immers een niet magnetiseerbaar materiaal te zijn. Ze wordt met 2
M5 bouten vastgezet in de polycarbonaat cylinder. Voor de luchtvoorziening
maakten we bij deze revizie gebruik van een mini Ventola blazer zoals we
die al eerder gebruikten in automaten zoals <So> en <Harma>.
De motoren werden omgebouwd en herbedraad om in driehoeksschakeling op driefazenstroom
te kunnen werken en daarmee een soepele regeling van het toerental -en daarmee
zowel druk als debiet- mogelijk te maken. De onderstaande foto geeft een
beeld van de gehele geautomatiseerde mondholte met mondstuk:
- 15.09.2005: verdere uitwerking ontwerp derde versie van de elektronika voor
<Autosax>, deze keer met rechtstreekse midi aansturing en onder gebruikmaking
van PIC mikrokontrollers.
- 26.04.2006: hertekening van de nieuwe elektronika
- 27.04.2006: Opstelling nieuw specifikaties voor de drie PIC's. Overleg met
medewerkers en gebruikers. Specs doorgestuurd naar Johannes Taelman.
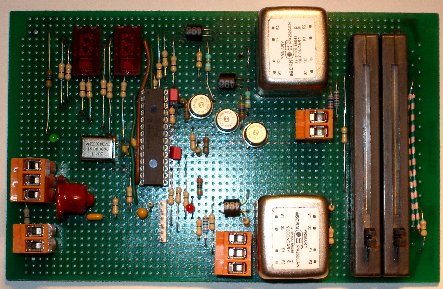
- 28.04.2006: Montage PIC board voor de besturing van de kleppen..
 Montage en bedrading relais voor de 170V hoogspanning.
Montage en bedrading relais voor de 170V hoogspanning.
- 29.04.2006: Assemblage en montage midi-hub board, tevens de besturingsPIC
voor de motor omvattend. Montage motor op trillingsdempers en Siemens motorcontroller.
- 30.04.2006: Konstruktie kegelventiel (conical valve) voor proportionele
sturing van de winddruk en de expressie.
- 01.05.2006: Verdere afwerking konstruktie kegelventiel. Een passend gedraaide
kegel in teflon zou beter zijn... geen teflon te krijgen op 1 mei..... duizend
bommen en granaten. Ventielkegel dan maar uitgevoerd in brons. De totale bouwhoogte
van het ventiel komt nu uit op 217mm.

- 02.05.2006: Verdere aanpassing en solderen midi-hub board.. Opstellen nieuwe
midi specifikatie en specifikaties voor de PIC implementatie. Doorgestuurd
naar Johannes Taelman. Users manual alvast aangepast. Bouw en inbouw 12V /
50VA analoge voeding voor het kegelventiel. Hiervoor gebruikten we een 50VA
toroidale tranfo gevolgd door een gelijkrichterbrug, een 4700mF afvlakelko
en een 78K12 regulator in TO3 behuizing. De gehele voeding werd gemonteerd
op een L vormig stuk gelast inox en met twee M5 inox inbus bouten op de bodemplaat
vastgezet.
- 03.05.2006: GMT software aangepast aan de nieuwe versie van Autosax. Konstruktie
24V/1A voeding en opamp voeding (+/- 15V 150mA). Montage op glasvezel versterkt
epoxy plaat. Schema toegevoegd aan de service manual.
- 04.05.2006: Montage 24V/1A voeding in de basis van Autosax. Bedrading afgewerkt.
De voorversterker werkt nu met een symmetrische voeding van +/-15V en verkrijgt
daardoor een wat groter dynamisch bereik. Eerste tentatieve programmering
van de motor kontroller.
- 05.05.2006: Programmatie Siemens Sinamics G110 motorcontroller.
- 06.05.2006: Test analoog versterkergedeelte voor sturing elektromagneet
riet.
- 09.05.2006: Programmering PIC1 -kleppen- met Johannes Taelman. Voorlopige
testkode voor evaluatie. Eerste tentatieve programmering PIC2: motor en kegelventiel
besturing.
- 10.05.2006: tests windkontrole. Voorziening controllers in midi implementatie
gewijzigd. Bug ontdekt in bedrading motorkontroller. Daardoor werkte het motor
on/off kommando niet.
- 12..05.2006: Pic programmeerproblemen uit de wereld geholpen door een upgrade
van MPLAB (nu versie 7.31) dankzij Johannes Taelman. Motor on/off werkte niet
omwille van een hardware bug: pull-up weerstandjes vergeten op het midihub
board... Voor test 100V lijntransfo ingezet voor aansturing rietmagneet vanuit
de ILP30 versterker.
- 13.05.2006: meet- en experimenteeropstellingen voor de riet driver. Een
dubbelzijdige bekrachtiging kan nodig blijken.
- 14.05.2006: Labowerk rond dubbele rietaktivering met autonoom instelbare
duty cycles, zelfde frekwentie en onderling verschuifbare fazerelatie.
- 17.05.2006: Verder labowerk rond rietsturingen.
- 18.05.2006: Windafdichting 5polige bajonet DIN in polykarbonaat cilinder.Rietmagneten
verbonden met resp. pinnen 1-3 (rietbekrachtigingsmagneet) en 4-5 (rietsluitmagneet).
Pin 2 is niet verbonden. Definitieve konstruktie en montage rietsluitelektromagneet.
Test met tweefazige aansturing van de elektromagneten. Tekening bij 23.08.2006
aangepast.
- 19.05.2006: TIG laswerk drager buis met kegelventiel. Buisbeugel voorzien
van M16 schroefdraad.
- 20.05.2006: Nieuwe proefopstelling voor tweefazige aansturing riet. Kegelventiel
blokkeert geregeld. Wellicht niet zuiver centrisch gemonteerd of gedraaid.
Kegelventiel gedraaid in kurk (vanwege de geringere massa), maar dit blokkeert
eveneens.
- 21.05.2006: Nieuwe binnenkegel voor kegelventiel gemaakt, nu in gepolijst
inox.. Dit klemt niet, lijkt vlot te werken maar maakt meer lawaai. Flens
gelast aan beugelstuk waarmee de luchtpijp wordt vastgehouden. Viltjes gekleefd
onder de stoppallen van de kleppen zodat de saxofoonmechaniek wat minder rammelt.
- 22.05.2006: Binnenkegel van het ventiel akoestisch dood gemaakt met blauwe
siliconenrubberdichting (Loctite).

- 23.05.2006: Autosax terug in de opstelling van het M&M orkest geplaatst
voor onderzoek van de rietsturing met behulp van PD gekoppeld aan GMT.
- 25.05.2006: Ontwikkeling rietsturingskode in PD door Kristof Lauwers.
- 29.05.2006: Verdere ontwikkeling rietbesturing in audio vanuit PD door Kristof.
- 01.08.2006: Overleg met Johannes Taelman m.b.t. de DS-PIC implementatie.
- 22.08.2006: Test-kode voor rietbesturing en tessituur door Kristof Lauwers.
- 19.10.2006: Achterwielen vervangen door degelijker exemplaren met polyuretaanbanden
van Blickle.
- 01.11.2006: DS-PIC board is nu geprogrammeerd voor de rietbesturing.
- 09.11.2006: test en evaluatiekode voor de DS-PIC geschreven in GMT module
voor de besturing van Autosax.
- 12.11.2006: tests DS-PIC voor rietaansturing.
- 13.01.2007: Verdere ontwikkeling DS-PIC test kode voor de rietbesturing.
Alleen in de allerlaagste regionen werkt het riet uitstekend. Zelfs goede
slaptongues zijn haalbaar, alleen normale noten voor dit type saxofoon kunnen
we nog niet goed produceren.
- 16.02.2007: Selektie dsPIC bepaald op type dsPIC30F3010. Deze heeft komplementaire
PWM outputs en kan ook gebruikt worden in <So> en <Hurdy>.
- 10.02.2008: Teorie rond elektromagnetische aansturing van rieten en soortgelijke
ferromagnetische materialen verder uitgewerkt in het artikel
'Expression control in automated musical instruments'.
- 19.08.2008: Nieuw ds-PIC board bestukt voor gebruik in Autosax. Eigenlijk
is het naar schakeling hetzelfde board zoals we dat ontwierpen voor <Aeio>.
- VERSION 4:
- 02.01.2009: Sound driver mechanisme opnieuw bekeken. Ontwerp van een rietdriver
naar model van de bij <Ob> toegepaste techniek, met name de akoestische
impedantiekonvertor.
- 13.01.2009: Ontwerp van een nieuw ds-PIC board, met voorzieningen voor amplitude
modulatie, externe input en feedback besturing.
- 14.02.2009: Draaiwerk van de nieuwe akoestische impedantiekonvertor uit
massieve messingstaaf, diameter 26mm. Evaluatie van de klank en de resonantie
in het instrument. Nu passen we een 100 Watt driver toe, hetzelfde type (Padu)
dat we ook gebruikten voor <Heli>.
- 16.02.2009: Verdere detaillering transfo specs voor Sawter Ltd. Uitwerking
dsPIC schakeling voor de generator en herziening van de midihub print.
- 17.01.2009: Bestukking van het nieuwe ds-PIC board, met display.
- 18.01.2009: ds-PIC board afgewerkt en eerste elektrische test uitgevoerd.
Stroomopname: 140mA, in hoofdzaak te wijten aan de TIL311 displays.
 Voor
de instellingen van de uitsturing naar de motor driver, pasten we twee Preh
schuifpotmeters van goede kwaliteit toe. Aangezien het exemplaren zijn voor
stereo gebruik, schakelden we beide sekties parallel, waardoor we op de kromme
weerstandswaarde van 2k3 uitkomen. De basis kode voor de firmware komt overeen
met die voor <Bono>. De golfvorm moet driehoekig zijn.
Voor
de instellingen van de uitsturing naar de motor driver, pasten we twee Preh
schuifpotmeters van goede kwaliteit toe. Aangezien het exemplaren zijn voor
stereo gebruik, schakelden we beide sekties parallel, waardoor we op de kromme
weerstandswaarde van 2k3 uitkomen. De basis kode voor de firmware komt overeen
met die voor <Bono>. De golfvorm moet driehoekig zijn.
- 19.01.2009: Bestukking van een nieuw midi-hub board voor Autosax. Ontwerp
drager in polykarbonaat voor de uitsturingsmeter (een kleine ronde draaispoel
paneelmeter uit 1942!) en de dsPIC print.
 De
beide antiparallel geschakelde germanium diodes beschermen de meter tegen
overbelasting.
De
beide antiparallel geschakelde germanium diodes beschermen de meter tegen
overbelasting.
- 20.01.2009: Bedrading van de nieuwe elektronika en inpassing in het chassis
van Autosax. Nazicht van alle voedingsspanningen. Test werking van het feedback
mechanisme.
21.01.2009: Oranje frontaal licht toegevoegd (12V halogeen, 5W), dimbaar.
LED strips aangebracht en bedraad. Blauwe LED's gemonteerd onderin het chassis.
- 22.01.2009: Bedrading verder afgewerkt. Polykarbonaat platen uitgezaagd
voor de bescherming van de lampjes en montage daarvan afgewerkt. De afscherming
is eenvoudig verwijderbaar.
- 24.01.2009: Polierwerk zijkanten polykarbonaat platen.
- 25.01.2009: We have measured the Padu100 driver component (100W - 16 Ohm
nominal) carefully and found the impedances in function of applied frequency
as follows:11.4 Ohms @ 100Hz, 23.68 Ohms @ 1kHz, 26.7 Ohms @ 10kHz and 45
Ohms @ 25kHz. The acoustic load does influence the measured impedance at 1kHz
over a 1:2 range: with the mouth completely closed it measures 32.8 Ohms and
with the mouth completely opened but without any resonator, 15.35 Ohms. This
phenomenon does not occur for the very low neither for the very high frequencies.
The measurements were performed with our new Hameg LCR meter, model HM8018.
The frequency response is 100Hz to 10kHz. The thread for mounting is 1 3/8"-18.
- 30.01.2009: Netschakelaar gemonteerd op het inox bovenblad chassis, onder
de polykarbonaat beschermplaat.
13.03.2009: Wachten op dsPIC firmware...
- 15.03.2009: PIC firmware development session with Johannes Taelman. Autosax
plays again, but needs further refinements on the tone production as well
as a revision of the valve-PIC firmware.
- 16.03.2009: Further testing.
- 18.03.2009: Although the dsPIC ought to be programmed, we cannot make it
to sound a note...
- 19.03.2009: Apparently the dsPIC got programmed with the wrong code version...
- 21.03.2009: dsPIC reprogrammed. Now Autosax plays again! The fingering tables
still have to be adapted for best resonance. The hub-board , with the controll
for external audio injection or microphone feedback still has to be programmed.
- 23.03.2009: First readaptation of the John Coltrane solo file for the new
Autosax. The file needs a lot of editing on the expression. As now it sounds
dull and rather like the conservatory students (... and teachers) from the
jazz department...
- 28.03.2009: Further work on the compression driver waveform. We hope Johannes
shows up tomorrow to fix the PIC on the midihub board..
- 12.05.2009: Autosax plays in quite a few pieces in the 'Sacred Robots' concerts.
However, the hub board is still not functional.
- 15.05.2009: Conduct repaired on one of the valves. Sebastian Bradt is working
on a new solo piece for Autosax.
- 24.05.2010: New acoustic impedance converter made on the lathe and mounted
on the robot. The capilary traject is taken much shorter now (3 times diameter,
or 12mm)
 This yields a much better sound.
This yields a much better sound.
- 08.06.2010: Conducts silenced a bit using blue silicone gel from Loctite.
- 10.06.2010: Mounting of new impedance converter with a M6 bolt finished.
- 18.06.2010: Midihub board programmed: lights are now functional.
- 19.06.2010: Debug session: the valve PIC firmware needs a revision now:
it should not do anything with the valves for notes above the normal range...
Also the sysexes still have to be implemented. There also seems to big a problem
with ctrl 8 for audio injection. The potentiometer seems not to work...
- 20.06.2010: some wiring mistakes corrected on the dsPIC board. The feedback
mechanism works nicely now and we can play multiphonics again. However, the
range of control for ctr.8 is way to narrow (works now only with values between
1 and 9). This part of the midihub PIC firmware needs a rescaling. PIC 1 needs
a revision, since it moves valves with notes in the range 120-127, the range
we implemented for the extra lights.
- 24.01.2011: Photoshoot for Robodies with Autosax.
- 23.11.2011: Glissando playing now fully implemented under GMT.
- 18.09.2012: Reconsidering the compressor driver circuit. Maybe we better
use a 32-bit ARM processor, building further on the experiences with <Klar>.
- 23.04.2013: Tracture wire on one of the valves repaired as we found it to
be broken.
- 08.01.2015: Amplifier board failure: there is a 14V dc voltage on the amplifier
output...
- 09.01.2015: Amplifier board removed for examination in the lab. Effectively
the HY30 amp found to be burned out and irreplaceable. Hence we made a new
amplifier board using a newer ILP amplifier module, ILP HY2001. Here is the
data sheet. The toroidal transformer used for the power supply is rated
for 30VA at 2 x 15V secondary. Robot rechecked and found to be healthy again.
Here is a picture of the new board before wiring:

- 10.01.2015: Circuit drawing adapted to the new situation:
- VERSION 5:
- 11.03.2020: Thinking of a version 5, exploiting the new discoveries made
during the construction of <Flut> and version 3 of the <So> robot.
A very first aspect we could improve, with minor changes to existing circuitry,
would be to modify the valve boards to this version:
 As
on valve power off, the capacitors will discharge over the coils, this should
reduce the substanial noise we had so far from valve-releases. Of course the
220uF caps have to be specified for a voltage of 200V.
As
on valve power off, the capacitors will discharge over the coils, this should
reduce the substanial noise we had so far from valve-releases. Of course the
220uF caps have to be specified for a voltage of 200V.
- 12.03.2020: Close inspection revealed that Autosax got a serious bump...
all the soldered posts for the right-low side keys found to be loose, with
none of the return springs functioning properly anymore... Where and when
did that happen? Asking around to my collaborators, as usual, nobody knows
of anything... Looking in detail to the design of the valve circuitry, we
conclude that it would be better to remove all circuitry dating back from
1990 and start from scratch, using two boards, each serving 8 valves. Once
we go this far, it looked like a good occasion to also replace the dsPIC board
with something like the newest boards developped for <Flut> and <So>,
version3. It looks like <Autosax> version 5 is coming...
- 13.03.2020: A new bunch of OP27 opamps ordered from RS-Components. Start
design of a PCB for the membrane compressor driver, using two 24EP128MC202
microprocessors. Here is the new circuit:
 As we noticed occasional glitches, we distributed the processing load over
two 16-bit processors here. The literature on formant frequencies seems to
indicate that formants and/or antiformants in saxophone sound are highly debatable.
One source gives this, for a tenor saxophone:
As we noticed occasional glitches, we distributed the processing load over
two 16-bit processors here. The literature on formant frequencies seems to
indicate that formants and/or antiformants in saxophone sound are highly debatable.
One source gives this, for a tenor saxophone: 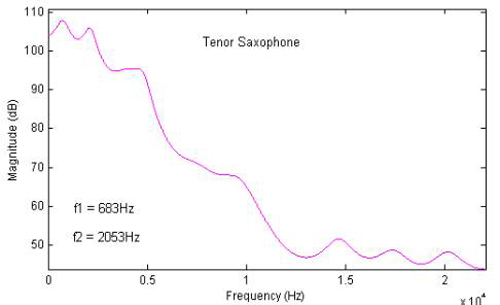 In
our design, we only implemented the higher formant frequency as the lower
one is strongly present anyway by the properties of the instrument itself.
The formant filter can be disabled by turning the multiturn trimpot fully
to the left.
In
our design, we only implemented the higher formant frequency as the lower
one is strongly present anyway by the properties of the instrument itself.
The formant filter can be disabled by turning the multiturn trimpot fully
to the left.
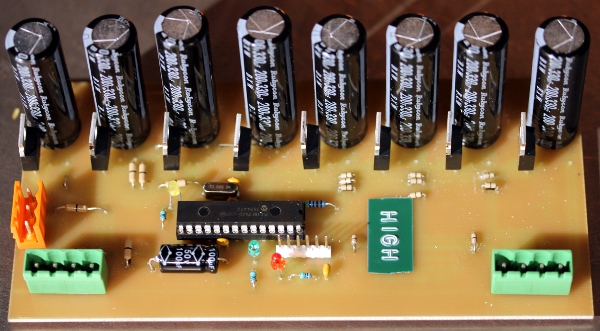
- 14.03.2020: Also for the keys, we designed a completely new circuit board.
We left the bulbs used as voltage dependent resistor from the original design
in place.
 Two
of these boards are used, each serving eight keys. This was not dictated by
any necessity, but only by convenience, as the distance between the keys would
dictate many long wires to get everything connected otherwize. PCB's designed.
Two
of these boards are used, each serving eight keys. This was not dictated by
any necessity, but only by convenience, as the distance between the keys would
dictate many long wires to get everything connected otherwize. PCB's designed.
- 15.03.2020: Exposing, developping, etching, drilling and soldering of the
newly designed boards. Start writing firmware for the membrane driver board.
Came out, we better have some communication between both chips. So we used
external interrupt on the pitch-PIC to steer note-off's. Of course, now we
have a 'flying' wire on the copperside of the board... For future version
we need to redesign the PCB. Here is a picture of he assembled board:
- 16.03.2020: Old circuitry, no longer required for version 5, removed from
Autosax. Debug and test session on the membrane driver board. For the key-boards,
we are still awaiting a delivery from Farnell as well as from RS-Components.
Decision made as to drop the external audio-feed from the design. It was not
used since 2004...
- 17.03.2020: 330uF/200V caps came in. Key-boards finished. Still waiting
for the 180V varistors. Two boards programmed with a first tentative version
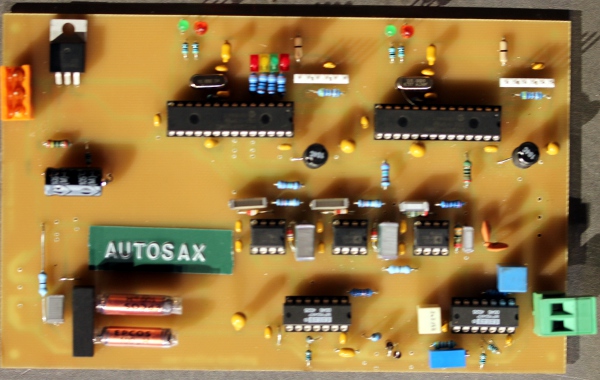
of the firmware. Here is one of these boards:
 First
test o.k, on the bench. However with the boards on the instrument, the lights
do work but the valves do not move anymore, having only 29V over them in the
on-state... There must be a design bug somewhere... Are the capacitors too
large? Is the output impedance of the power supply too high to charge the
capacitors fast? Close looking at the circuit revealed the failure: the RC
time, with a cold bulb (240 Ohm) and the 330uF capacitor is 79 ms, but with
a hot bulb at 170V it increases to 211 ms. The bulb changes resistance over
an estimated period of ca. 200 ms... So we should either use bulbs with higher
power (100W or so, in as far as these exist with bi-bajonet fittings (BA15d)...)
or decrease the value of the capacitors by a factor ten or so.
First
test o.k, on the bench. However with the boards on the instrument, the lights
do work but the valves do not move anymore, having only 29V over them in the
on-state... There must be a design bug somewhere... Are the capacitors too
large? Is the output impedance of the power supply too high to charge the
capacitors fast? Close looking at the circuit revealed the failure: the RC
time, with a cold bulb (240 Ohm) and the 330uF capacitor is 79 ms, but with
a hot bulb at 170V it increases to 211 ms. The bulb changes resistance over
an estimated period of ca. 200 ms... So we should either use bulbs with higher
power (100W or so, in as far as these exist with bi-bajonet fittings (BA15d)...)
or decrease the value of the capacitors by a factor ten or so.
- 18.03.2020: Bailey Electric BV in the Netherlands seems capable of delivering
240V / 60W bulbs with BA15d sockets. 75W bulbs also exist. We inquired. Their
hot-resistance should be 960 Ohm. They will only have them in stock from june
2020 on... As a test, we parallelled the existing bulbs with a 680 Ohm / 10W
resistor. This way it works, but the resistor gets very hot... The trick with
the capacitor over the coils indeed helps a lot in silencing the keys on closure.
- 20.03.2020: Tractures improved and readjusted on the keys.
- 21.03.2020: Alps potmeter soldered on the membrane driver board, board mounted.
First tests. The firmware behaves o.k. but we have to start the work on the
waveform lookup tables. Some hum noticed. Do we have a ground-loop somewhere
or is it stemming from bad 5V power supply regulation? Also, we need to update
the test-code in GMT. Apparently, there is a strong above audio oscillation
on the HY2001 amplifier... This seems to cause the hum. Also there is a DC
voltage over the output, indicating an amplifier failure... So we will have
to find a replacement. The Texas TPA3129D2
is a good candidate and we still have an evaluation
board for it in stock as well as a suitable 24V power supply.
- 22.03.2020: Taking the old amplifier to the lab, revealed no errors whatsoever.
Close examination of the wiring to the new membrane compressor disclosed the
real bug: we interchanged ground and signal on the Weidmueller connector....
Problem solved and no replacement amp required. Continued tests with the firmware.
- 23.03.2020: ADSR at work:
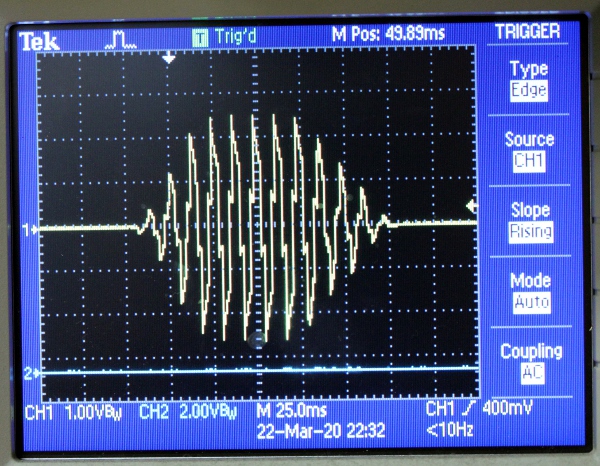 Trying to trace the origin of sporadically occuring glitches. ADSR system
rewritten using floats. Four different registers implemented now.
Trying to trace the origin of sporadically occuring glitches. ADSR system
rewritten using floats. Four different registers implemented now.
- 24.03.2020: Further refining of the firmware: vibrato and tremolo should
now work to perfection. No more floating point in the interrupt handlers as
this seems to be taboo. New bulbs with BA15d sockets ordered.
- 26-27.03.2020: New sample based wavetables implemented in the firmware.
- 28.03.2020: Still awaiting delivery of the ordered components... Corona
is delaying everything these days.
- 29.03.2020: Implementation of note-off's modified such as to solve problems
with overlapping notes in sequences and with keyboard useage.
- 30.03.2020: Controller 13 implemented for use of different lookup tables
for the fingerings. Output waves recorded. After editing - a task confined
to Lara Van Wynsberghe- , we can perform the further transformation to an
excitation wave.
- 31-05.04.2020: Further extensive work on the calculation of exciting waves.
A demo streamed via Facebook, as due to the corona measures, we could not
demonstrate it in a concert for an audience.
- 16.04.2020: The ordered Halolux 230V/40W BA15d bulbs came in today from
Gloeilamp Goedkoop.be. Cold-resistance of these bulbs is 89 Ohm.
- 18-20.04.2020: Further work on the key mechanism. All bulbs placed and tested.
- 05.05.2020: Firmware for the two PIC 24EP128MC202 processors improved. Setting
PTPER to 2047 instead of 2048 killed most of the glitches...
- 29.05.2020:A way to further improve the compressor driver design would be
to use a digital log potmeter instead of the multiplier we have now for general
amplitude control. The best candidate to perform this task would be the PGA2310
chip produced by Texas. First of all it contains two potmeters with independent
control, such that we could implement again the external audio-feed input
we had in earlier versions. Feedback modes of operation would become possible
again. The dynamic range is certainly good enough and the control of the device
only requires a 16-bit serial input signal as well as a synchronous clock.
Easy to implement on the amplitude PIC microprocessor. We also researched
the possibility to use this chip for the ADSR function as well, but had to
reject it because it appears impossible to avoid glitches with the amplitude
refresh data rates required in this design.
- 06.12.2020: Bug killed in the PIC24 firmware: irregular glitches due to
wrong way of reading 32 bit timers.
- 12.12.2020: Firmware for the PIC24EP upgraded with a better implementation
for the ADSR system. Same principles applied also to <Hunt>,<Bug>,<Flut>.
We also have a more extensive implementation for controller 80 now, with dynamic
ranges 20dB, 30dB, 40dB, 50dB and 60dB. The default still is 40dB.
- 13.12.2020: Upgrade firmware finished and PIC's reprogrammed. Tests o.k.
At cold boot however, we suffer from the same motorboating phenomenon as we
also have on <Bug>. A minor problem in fact.
- 19.01.2021: Some bugs discovered in the implementation of vibrato. Firmware
upgraded. No changes for users required.
- 15.08.2022:GMT coding rechecked and brought in-line with the PIC implementation.
Robody pictures with <autosax>:





Technical notes, wiring and maintenance data:
(not intended for the general public, but required for repairs and servicing)
Circuit overview:
The 12V analog power supply is straightforward and uses a 50VA toroidal transformer
mounted on the bottom plate in the very front of the instrument. To remove this
power supply, loosen both stainless steel M5 bolts holding the frame. The hefty
230V/630VA transformer is mounted on the bottom plate next to the 12V supply,
followed by the double-diode rectifier and the electrolytic capacitors. Watch
out when servicing: high voltage. The analog power supply for the 5V is mounted
in a U shaped housing on the backside of the bottom plate.
Valve solenoid boards - schematic (Version 5.0):
There
are two of these boards, each steering eight keys.
The hold voltage over the solenoids with the bulbs specified is ca. 60V dc.
The circuitry is dangerous to touch! Be carefull when servicing. The system
using the light bulbs as voltage dependent resistors was kept from the original
design dating back to 1990. The 330uF capacitors over the solenoids, a new design
element, help in suppressing noise on key releases. On note-off, the capacitors
discharge over the solenoid and thus slow down their release action. The firmware
for these boards can be found here:
The original bulbs are 240V / 25W types with BA15d sockets (Girard Sudron).
Cold resistance is 240 Ohms, Hot at 240V resistance goes up to 2307 Ohm. At
170V the resistance is 640 Ohm. These bulbs were replaced with halogen types
(230V/40W) april 16th of 2020. Cold resistance is 89 Ohms. Hot resistance at
230V ought to be 1322 Ohm (calculated).
Circuit for the midi hub board, also containing the PIC microcontroller for
the controllers (Version 4 and 5):
The frontal orange light holds a halogen bulb rated 12V - 5W, G4 socket. The
bulb is secured in the socket with two small screws which must be loosened before
removing and replacing the bulb.
The Yellow LED strips are type number LM-FB26Y-12, Farnell order code: 122-8819
(Cost: ca. 20 Euro's for a strip). These magnificent components are going out
of production in 2009...
The blue quad LED assemblies come from Conrad and are disassembled from a car
'tuning' kit.
Power switch: A4TN15W04, toggle on-on, Farnell order nr.1629111
Audio amplifier board (2015 repair): Using a ILP HY2001 amplifier module and
a toroidal 30VA 2x15V secondary transformer for the power supply. Input impedance
is 100kOhms and input sensitivity is 500mV. The data sheet for the amplifier
can be found here.
This is the circuit:
The membrane compressor driver uses two 16 bit PIC-processors. Here is the
circuit drawing:
The firmware for these two microprocessors is available here:
Note that the same source code is used for both processors. Metacompiler commands
are in the source code for compilation of the two very different compilations.
Archival versions:
Webpage on <Autosax> Version
3.0 (archival)
Webpage on <Autosax> Version 4.0
(archival)
Literature and bibliography:
Beauchamp, J.W., "Analysis of Simultaneous Mouthpiece and Output Waveforms
of Wind Instruments" . In: j-aes, 1980, Preprint No. 1626,
Benade, Arthur .H., "Fundamentals of Musical Acoustics". Ed.: Oxford
University Press, 1976.
Kergomard, Jean (a.o), "What we understand
today on formants in saxophone sounds?", 2013
Kergomard, Jean (a.o), "Role of the
resonator geometry on the pressure spectrum of reed conical instruments",
2019
Raes, Godfried-Willem, "Kursus Akoestiek", Ghent University College
1982/2014, Internet: http://www.logosfoundation.org/kursus/
Raes, Godfried-Willem, "Expression
control in musical automates", 1977/2020,
Raes, Godfried-Willem, "Logos
@ 50, het kloppend hart van de avant-gardemuziek in Vlaanderen", ed.
stichting kunstboek, Oostkamp 2018.
Smith, Bob H., "An Investigation of the Air Chamber of Horn Type Loudspeakers",
in: The Journal of the Acoustical Society of America 25, 305-312 (1953); https://doi.org/10.1121/1.1907038
First published on the web February 22th
1991 by Godfried-Willem
Raes
Last update: 2022-08-15