 Autosax
Autosax<Autosax>
an automated saxophone
archival version 3 - 2007 (For version 4 click here)
by Godfried-Willem Raes
1991-2009
This instrument is a computer controlled acoustical saxophone. The instrument can be played by standard MIDI commands, but it is also capable of producing a wealth of multiphonics, slaptongues and other special effects. The sound production is realized through an acoustical but computer controlled reed mechanism using a compressor for the wind supply and a fast regulating conical valve for expression control.
The lightbulbs -clearly visible on the picture- are not just a visual feature but serve as voltage dependent resistors in series with the solenoid valves controlling the keys, thus preventing overheating of the coils when many keys are opened and stay opened for a long time. Different and non standard fingerings can be applied, leading eventualy to multiphonics.
The instrument is controlled via MIDI. It uses 3 PIC microcontrollers, one of which is a DS type used for the reed control, the tuning and the intonation, the other ones taking care of the keys and the airpressure and compressor motor.
The normal note range is 48 to 81, but due the possibilities of the reed mechanism, we provided in an extended range in the low end, descending down to midi note 0. Of course users should not expect a realistic C-melody saxophone sound from this range. The sounds produced in this extended range are far too interesting to leave them out of the range of possibilities.
The development of this automated saxophone took us some 15 years and <Autosax> has known 3 different working realisations in its history. We are now, 2007, at version 3.
Midi implementation:
Compositions where <Autosax> is an important part of the robot orchestra:
|
Collabotarors: Kristof Lauwers, Johannes Taelman Technical specs (for organizers):
|
| Back to Godfried-Willem Raes index-page | Back to Logos main index page | Composers Guide to the M&M robot orchestra | To Instrument Catalogue Godfried-Willem Raes |
Reeds verschillende jaren vormde het ding niets meer dan een dekoratief onderdeel van mijn elektronische werkplaats bij de Stichting. Ik had het op een gewone en dus regenachtige zaterdagochtend in 1989 gezien op de Gentse rommelmarkt, en herinner me nog hoe ik het - nog voor ik goed en wel besefte wat het eigenlijk was- reeds goed en wel in mijn bezit had gekregen. Eens thuis onderwierp ik de buit aan een nauwgezet onderzoek. Op het eerste gezicht leek het verraderlijk sterk op een tenorsaxofoon, maar de kleppen waren niet voorzien van plaatjes voor vingers. Alle hefbomen hadden integendeel een klein zijwaarts geboord gaatje. Het kon niet anders dan afkomstig zijn van een of andere grote orkestrion. Het klankopwekkingsmekanisme ontbrak echter, en ik vermoedde toen dat dit uit een pneumatisch gestuurd tongwerk moet hebben bestaan. Hoewel, sommige orkestrions omvatten instrumenten die weliswaar mee bewegen met de muziek, maar helemaal niet klinken en dus een louter vizuele funktie hebben. Vele jaren later werd dit vermoeden trouwens ook door de historische feiten bevestigd, toen het instrument afkomstig bleek uit een wat dekadent dansorgel van Grymonprez uit Ledeberg bij Gent... Ik herinnerde me nog mijn pogingen er een autentiek tenorsaxofoonmondstuk op gemonteerd te hebben. De toonladder was kromatisch en redelijk korrekt. Er was een klep voor elke kromatische halve toon. De speelbaarheid was evenwel bijzonder problematisch, niet alleen door het ontbreken van de steuntjes voor de vingers, maar bovenal door de onmogelijk te grijpen afstanden tussen de diverse hefbomen onderling. Ik schoof het ding terzijde, wel beseffende dat er wel iets originelers mee aan te vangen zou zijn, dan het terug te brengen tot een of andere vorm van de bekende tenorsax.
Het ding was dus al vele jaren naar het hinterland van mijn onderbewustzijn verhuisd, toen op een - alweer- bijzonder regenachtige novemberweekend in 1991, ik het ding ter hand nam en begon aan de konstruktie van een volautomatische komputergestuurde tenorsaxofoon.
Voor de automatische sturing van de kleppen op het instrument -dat leek me het eenvoudigste deel van het optwerp- maakte ik dankbaar gebruik van de voorraad elektromagneten die ik ooit kreeg van mijn vriend - overigens ook een uitstekend komponist en instrumentenbouwer - Alec Bernstein. Deze elektromagneten werden oorpronkelijk gemaakt voor gebruik in een piano-'Vorsetzer' van de firma Maranz, die evenwel over de kop ging. Alec was zo slim, de hele fabrieksvoorraad in te kopen...
De kern van deze spoelen bestaat uit een cilindrisch stuk ferriet met een ingetapt uiteinde. Hiervoor maakte ik aluminium oogjes waardoorheen veerstalen haakjes voor de overbrenging op de kleppen konden aangebracht worden. De werkspanning van de spoelen is berekend op 170Volt D.C. , overeenkomstig rechtstreeks gelijkgerichte en afgevlakte Amerikaanse netspanning. Aan 0.5A per bekrachtigde spoel, betekent een en ander een (teoretisch) maximaal opgenomen vermogen van omstreeks 1kW! Anders dan bij player- pianos immers, worden bij blaasinstrumenten heel normaal veel kleppen tegelijkertijd bekrachtigd. In mijn ontwerp echter kwam het erop neer dat de zaak algauw gloeiend heet liep... Om dit euvel - dat destruktieve gevolgen had kunnen hebben - te verhelpen, bouwde ik een speciale sturing voor de elektromagneten gebruik makend van pulsbreedte-gemoduleerde gelijkspanning. Ook voor de uitsturing van de nodige signalen (spoelen aan/uit en pulsbreedte van de bekrachtigingsspanning), bleek komputersturing een vereiste.
Het klankmechanisme dat ik er aanvankelijk voor bedacht, berust op zuiver akoestische maar komputer-gestuurde feedback in het instrument zelf. Daartoe monteerde ik op de plaats van het mondstuk een luidsprekermotor (een hogedrukkamer) en in de klankbeker een mikrofoon. Door sturing van de versterkingsfaktor en door toepassing van filters in het tussen beide opgenomen elektronisch netwerk, bleek het mogelijk alle tonen vrij realistisch te produceren. Alleen de aanspreeksnelheid van de diverse noten liet wel nogal wat te wensen. Om dit te verbeteren, plaatste ik dan in de eerste versie 6 verschillende miniatuur elektretmikrofoontjes bij de diverse toongaten. Als nu de mikrofoontjes geschakeld en onderling gemengd konden worden in funktie van de te produceren tonen, dan was het doel virtueel bereikt. Daarvoor moest evenwel noodzakelijkerwijze alweer op komputersturing beroep gedaan worden. Dit, onder meer omdat de feedbackregeling bijzonder snel dient te gebeuren, a rato namelijk van zo'n 100 instellingen en instrukties per sekonde. Traag voor een komputersturing, maar beslist te snel voor de manuele bespelingsmogelijkheden van musici, zeker wanneer die via instelknopjes en schakelaars zou dienen te gebeuren. In een eerste uitvoering bouwden we voor de klankopwekking een behoorlijk komplekse schakeling met 6 bandfilters (een per mikrofoon) gevolgd door VCA's. De VCA's werden opgebouwd met 8-bit DAC's waarvan evenwel slechts 4 bits werden benut, de overige bleven op die wijze vrij voor de kanaalselektie en de adressering. Een enkel byte kon zo volstaan voor de kontrole van de feedback loop en dus van de klankopwekking zelf. Een zekere traagheid in het aanspreken van de diverse noten bleef evenwel ook in dit ontwerp helaas aanwezig, maar m.i. was dit vooral te wijten aan het beperkte vermogen van de gebruikte luidsprekermotor (15Watt). Met een piekvermogen, gedurende het aanzetten van de toon in de orde van 100Watt zou allicht een beter resultaat op dit vlak kunnen bereikt worden. Ook kon het nogal eens gebeuren dat een andere noot dan de voorziene werd geproduceerd. Omgevingsgeluid speelde daarbij een belangrijke rol, wat uiteraard de opname in een orkestrale kontekst kompromiteerde. Onbevredigd door de resultaten van versie 1, herbouwden we in 2002 de stuurschakeling voor <Autosax> volgens een geheel nieuw ontwerp, waarbij de feedback sturing geheel in software werd gerealiseerd. De -frekwentieselektieve en aan het toonbereik van de saxofoon aangepaste voorversterker voor de voor het paviljoen gemonteerde elektret mikrofoon kwam eruit te zien zoals op de afbeelding opgenomen in het bouwdagboek. Feedback sturing via een digitaal stuurbare versterker-mixer schakeling bleef ook in deze tweede versie een optie voor deze robot.
Voor de komputersturing had het zo ontstane instrument voldoende aan 2 bytes voor de sturing van de spoelen/kleppen, naast het ene byte voor de feedbackkontrole. Dit kon gemakkelijk geimplementeerd worden via de op zowat alle komputers beschikbare parallel-printerpoort. Hiervoor gebruikten we hetzelfde demultiplex board zoals we dat ook ontwikkelden voor automaten zoals <Klung>,<ThunderWood>, <Troms> enzomeer. Omdat elk individueel bit via software kan gemanipuleerd worden, blijkt het perfekt mogelijk ook micro- intervallen, vorkgrepen, kleppengerammel, multiphonics door het instrument te laten voortbrengen. Ook 'zingen en spelen' tegelijkertijd is makkelijk te voorzien, door een vokaal (eventueel vanuit een stemsynthesiser ofwel vanuit een sampler) signaal in het mixergedeelte bij de mengen.
Om de responstijd te versnellen, het zwakke punt van het gehele ontwerp, zowel in de eerste versie als ook in de tweede, stuurden we in de tweede versie van <Autosax> bij elke aan te sturen toonhoogte een korte uitstervende sinus in de mixer. Hoewel dit op het eerste gezicht een 'overtreding' lijkt te zijn van het anderszins zo akoestische werkingsprincipe van het instrument, is het toch zo dat ook een speler van vlees een bloed wel degelijk anticipeert op de te spelen noot, wil hij deze tenminste trefzeker en goed aan zijn instrument ontlokken. In dit geval was echter in de komputerimplementatie nood aan het gebruik van het audiosubsysteem: de ingebouwde soundcard van de PC. Aan de hardware hoefden voor dergelijke uitbreiding geen wijzigingen te worden aangebracht. Overigens kon hiervoor ook een externe gewone midi-synthesizer worden gebruikt.
Hoewel Autosax in deze versie verscheidene jaren deel uitmaakte van het <M&M> robotorkest, waren we toch niet echt gelukkig met het voortgebrachte geluid. Het klonk me veel te sintetisch, elektronisch en eendimensioneel. In 2005 en 2006 onderging <Autosax> daarom een derde welhaast volledige herziening (versie 3) , waarbij volledig afgezien werd van het oorspronkelijke feedbackmechanisme, maar waarbij we integendeel poogden het riet zelf onder mikroprocessor kontrole aan het trillen te brengen. Heel wat research staken we in de ontwikkeling van het riet zelf en de aansturing (cfr. bouwdagboek). Uiteindelijk werd het een samengesteld riet, deels uit riet deels uit staal. Het grote probleem bleek de bouw van een riet dan redelijk lineair aan het trillen kan worden gebracht over een breed frekwentiegebied. Een erg lage eigenfrekwentie bleek noodzakelijk. Voor de kontrole daarvan deden we beroep op de DS-PIC microcontroller van MicroChip. Om een redelijk ' menselijke' kontrole mogelijk te maken van de toonvorming ontwikkelden we een speciaal kegelventiel. Hiermee wordt een werkelijke artikulatie van de voortgebrachte klanken mogelijk.
De 'Autosax' zoals ik het instrument heb gedoopt, werd opgebouwd als een vrijstaande ruimtelijke robot-skulptuur: als een saxofoon in speelklare positie, maar zonder speler. Daartoe werd het instrument op een gelast statief voorzien van talloze beugeltjes voor de vele elektromagneten, de elektronische stuurschakelingen en de diverse voedingen en interfaces geplaatst. Het werkende instrument werkt dan ook vizueel bevredigend: alle schakelingen zijn transparant en zichtbaar zodat het niets verhult. Een naakte automaat.
Godfried-Willem RAES, 1992-2008
|
Medewerkers: Kristof Lauwers, Johannes Taelman Technische specifikaties (voor organisatoren):
|
Bouwgeschiedenis en bouwdagboek
Autosax onderging in de loop van zijn ontwikkeling tot nu toe drie onderscheiden stadia die elk met een werkende robot werden afgesloten. De globale ontstaansgeschiedenis en de technische details daarvan worden in volgend dagboek gedokumenteerd.

 De foto toont deze eerste versie van de werkende <Autosax>. De darlingtons
werden vervangen door IRF610 mosfets voorzien van een kleine koelvin..
De foto toont deze eerste versie van de werkende <Autosax>. De darlingtons
werden vervangen door IRF610 mosfets voorzien van een kleine koelvin.. Deze
schakeling levert meteen ook de nodige spanningen voor de mikrofoonvoorversterkerschakeling.
Deze
schakeling levert meteen ook de nodige spanningen voor de mikrofoonvoorversterkerschakeling.
 De foto werd genomen op dit koncert.<Autosax> wordt er bespeeld met
een subnotebook komputer gebruik makend van het USB interface.
De foto werd genomen op dit koncert.<Autosax> wordt er bespeeld met
een subnotebook komputer gebruik makend van het USB interface.
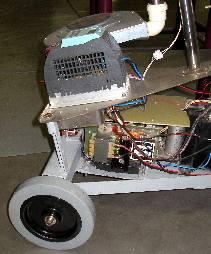
De gehele konstruktie werd in een cylinder van polycarbonaat met gelaste inox deksels en aansluitingen voor enerzijds de saxofoon, anderzijds de kompressor en de elektrische aansluitingen, ingebouwd. De elektromagneet werd op een geveerde en verstelbare slede gemonteerd voor een makkelijke mechanische afregeling. De foto hieronder toont twee komponenten van het mechnisme in hun korrekte positionering:
De slede voor de elektromagneet werd gemaakt in spuitgietaluminium. Het
diende immers een niet magnetiseerbaar materiaal te zijn. Ze wordt met 2
M5 bouten vastgezet in de polycarbonaat cylinder. Voor de luchtvoorziening
maakten bij deze revizie we gebruik van een mini Ventola blazer zoals we
die al eerder gebruikten in automaten zoals <So> en <Harma>.
De motoren werden omgebouwd en herbedraad om in driehoeksschakeling op driefazenstroom
te kunnen werken en daarmee een soepele regeling van het toerental -en daarmee
zowel druk als debiet- mogelijk te maken. De onderstaande foto geeft een
beeld van de gehele geautomateerde mondholte met mondstuk:
 Montage en bedrading relais voor de 170V hoogspanning.
Montage en bedrading relais voor de 170V hoogspanning.
| Back to Godfried-Willem Raes index-page | Back to Logos main index page | Composers Guide to the M&M robot orchestra | To Instrument Catalogue Godfried-Willem Raes |
Technical notes and maintenance data:
(not intended for the general public)
Circuit overview:
The 12V analog power supply is straightforward and uses a 50VA toroidal transformer mounted on the bottom plate in the very front of the instrument. To remove this power supply, loosen both stainless steel M5 bolts holding the frame. The hefty 230V/630VA transformer is mounted on the bottom plate next to the 12V supply, followed by the double-diode rectifier and the electrolytic capacitors. Watch out when servicing: high voltage. The analog power supply for the 5V is mounted in a U shaped housing on the backside of the bottom plate. The 24V power supply uses a small 1A transformer and follows the traditional analog design rules. It also houses a small 150mA DC DC converter used for powering the microphone opamp circuitry. The DC DC converter is made by Klaasing Electronics, Power Module type number 7KR24-15D150. Now this type is distributed by Advantec Electronics BV, with the type number D5R24-15D150. (2006)
Midi Input board & Motor Control board PIC2:
Valve solenoid boards - schematic:
The hold voltage over the solenoids with the bulbs specified is ca. 60V dc. The circuitry is dangerous to touch! Be carefull when servicing. The valve boards themselves date back from 1991, the PIC board belongs to the 2006 revision.
Circuit for the midi hub board, also containing the PIC microcontroller for the motor and the valve solenoid:
Construction drawing and picture of the practical realization for the low pressure proportional conical valve designed for autosax:

All parts are made of stainless steel AISI 304 / 316.
Softshift Solenoid data:
Vertical softshift solenoids for expressive wind pressure modulation mounted inside the conical valve: Ledex Softshift type 5EP (now Saia Burgess), number 193015-026. Cold DC resistance 10.3 Ohm. Nominal working voltage at 100% duty cycle: 14V.
For the working of this valve, taking into account the very low air pressure (ca. 6.5mBar), a voltage of 12V is enough. The valve starts opening with a voltage of 2.6V and is fully opened with 11V.
Motor data & parameter list for the motor controller:
Controller: Siemens Sinamics G110
Motor: triangle connected, 3x132V - 0-75Hz, 70W, 2800 rpm at 50Hz
Programming information and settings for the Siemens Sinamics G110 motor controller:
| Parameter nr. | setting | comment |
| P0003 - User Access level | 3 |
|
| P0004 - access control filter params | 0 | allow access to all parameters of P0003 = 3 |
| P0005 - display parameter | 21 | display motor frequency |
| P0010 - commisioning params | 0 |
must be set to 1 to change motor params. For access to P4 params and normal operation, must be set to 0 |
| P0100 - Europe/ US | 0 | = default value (Europe, 50Hz) |
| P0210 - voltage | 230V | mains voltage |
| P0304 - nominal motor voltage | 132V | motor specs. |
| P0305 - motor current | 0.56A | motor specs. |
| P0307 - motor power | 0.07 kW | motor specs. |
| P0310 - nominal motor frequency | 50Hz | motor specs. |
| P0311 - nominal motor rpm | 2800 | motor specs. |
| P0700 - ctrl. via control panel or digital I/O | 2 | use digital inputs for ctrl. |
| P1000 - select frequency setpoint | 2 | set analog setpoint (1= operator panel f-ctrl) |
| P1080 - min.. motor frequency | 0 Hz | |
| P1082 - max. motor frequency | 75Hz | |
| P1120 - ramp up-time | 2" | |
| P1121 - ramp down time | 5" | |
| P2000 - max.frequency setpoint | 80Hz | |
| P3900 - end quick commisioning | 1 | resets P0010 |
Wiring details reed driver plug:
| Back to Godfried-Willem Raes index-page | Back to Logos main index page | Composers Guide to the M&M robot orchestra | To Instrument Catalogue Godfried-Willem Raes |
Last update: 2020-03-29