<M&M> Robot Orchestra breidt uit!Het mag dan al weer een tijdje geleden zijn dat ons <M&M> orkest uitbreiding nam, maar binnenkort is het weer zover, en ditmaal met maar liefst twee vliegen in een klap. Niet alleen heeft Godfried-Willem Raes zich de afgelopen maanden vastgebeten in de afwerking van het mini-orgeltje <Bomi>, ook de geautomatiseerde cello <Aieo> heeft de steigers verlaten om het automatenorkest aan te vullen met zijn hypnotische zachte drones. We stellen ze u even voor, en doen dat zoals steeds aan de hand van dagboekuittreksels van de bouwer zelf. 1. <Bomi>
2. <Aeio> Nu lijkt een tessituur van een enkel oktaaf wel wat weinig om van een cello te kunnen spreken, ware het niet dat ons mechanisme, ook zonder gebruikmaking van inkorting van de snaren, in staat is ook alle boventonen van die twaalf noten te laten klinken. Zo kunnen we de gehele tessituur bestrijken. Om de expressiemogelijkheden niet te eenzijdig te maken, voorzien we elke snaar van een individuele vilten demper. Daardoor kunnen melodische lijnen toch goed geartikuleerd worden gespeeld. Snelle staccatos en zeker pizzicatos zijn evenwel principieel onmogelijk omdat daarvoor enorm sterke elektromagneten nodig zouden zijn en omdat het werkingsprincipe staat of valt met het in resonantie brengen van de snaar, wat steeds een kleine tijd in beslag neemt. De trilling van de snaar moet opgebouwd worden, zoals dat ook bij een slinger het geval is. Voor de toonvorming van <Aeio> zijn 12 dsPIC processoren nodig. Hiervoor selecteerde we het type dsPIC30F3010. Elke processor neemt de besturing van een enkele snaar voor zijn rekening. Er zijn tweemaal drie PWM uitgangen beschikbaar op deze processoren, waarbij elk koppel uitgangen telkens het signaal in faze en het signaal in tegenfaze (negatie) levert. Hiervan maakten we gebruik om de snaar alternerend met twee elektromagneten, elk aan een tegenovergestelde kant van de snaar gelegen, aan te sturen. De pulsbreedte van deze PWM signalen evenals de dood-tijd is in de software instelbaar. Deze signaaleigenschap wordt gebruik voor de implementatie van de velocity sturing van note-on's. De dempers worden bestuurd vanuit een kleiner type PIC processor, een PIC18F2525. Het note off kommando aktiveert de dempers. De dempkracht kan worden gestuurd door de waarde van het release byte. Een modus om zonder de dempers te speler is eveneens voorzien. Het werkingsprincipe, waarbij twee elektromagneten alternerend de snaar aansturen met een PWM signaal ziet eruit als getekend in onderstaande vluchtige schets:  De snaren moeten uiteraard uit ferromagnetisch materiaal bestaan en om een goede magnetische koppeling te verkrijgen met de aangelegde magneetvelden is het wenselijk dat ze zo dik mogelijk zouden zijn. Daar staat natuurlijk als bezwaar tegenover dat naarmate de snaar dikker wordt genomen, de inharmoniciteit sterk gaat toenemen enerzijds en anderzijds dat de snaar dan erg moeilijk over stemmechanismen en kammen te geleiden valt. Een kompromis diende dus gezocht te worden. Dit leidde tot de keuze voor snaarmateriaal in gehard staal met een diameter van 1.5mm. Dat is heel wat dikker dan gebruikt voor de dikste snaren of kerndraden daarvan in pianos. De snaarspanning ligt een heel stuk onder wat voor een luide klank wenselijk zou zijn, maar hierdoor wordt de aanspreeksnelheid wel sterk verhoogd. Het risiko op snaarbreuk is meteen ook zo goed als onbestaand in dit instrument. Het signaal in twee fazen toegevoerd aan de elektromagneten kan grafisch voorgesteld worden alsvolgt: Hoewel we de snaarbeweging om haar as tekenden als min of meer sinusvormig, hoeft dit geenszins het geval te zijn. Door de B tijd te vergroten wordt de beweging van de snaar veel meer zaagtandvormig en benaderd ze de gestreken snaarklank. Het heeft geen zin de B tijd korter te maken dan de tijd die de snaar onder invloed van haar veerkracht nodig heeft om weer naar haar axiaal middelpunt terug te keren. (1/4 van de periodetijd, dus voor noot 36 geeft dat 3.9ms). De duty cycle van de signalen blijft dan ook kleiner dan 25%. Overigens is de tekening slechts min of meer geldig wanneer de exitatie van de snaar door de magneten erg klein is. Vanzodra deze groter wordt moet ook het veer-karakter van de snaar in rekening worden gebracht. Dit veroorzaakt een nuldoorgang van de snaar voor het eind van de B faze. De hieronder weergegeven tekening benadert beter de snaarbeweging bij een substantiele aandrijfkracht. Het valt ook op dat we hier al heel wat dichter de golfvorm eigen aan een gestreken snaar kunnen benaderen, per slot van rekening toch wel het opzet bij het ontwerp van deze robot. Hoewel oorspronkelijk bedacht om de snelheid van het aanspreken van de snaren te verhogen, blijken de voor dat doel toegevoegde kloppertjes ook als extra feature op zich bruikbaar. De elektromagnetisch gestuurde hamertjes zijn met leder of hard vilt bekleed en kunnen ook in dynamiek worden gestuurd. Ze werden gemapt in het oktaaf onder de normale tessituur van het instrument.
|
 Voor de bouw van deze automaat maakten we gebruik van een eerder toevallige aanbieding op de website van August Laukhuff, voor een volledig in hout gebouwd 4-voet orgelregister met labiaalpijpen. Dit loopt vanaf midi noot 60 tot en met 91. De pijpen voor de noten 55-59 werden speciaal bijgebouwd. De windlade is, afgezien van het bovenblad waarop de pijpen rusten en waarvoor tropisch hardhout werd gebruikt, geheel vervaardigd uit gelast inox en polykarbonaat, waardoor een transparante windlade kon worden gerealiseerd. (Geheel naar analogie trouwens met de windladen zoals we die eerder al ontwierpen voor <Qt>, <Trump> en <Krum>). De elektromagnetische ventielen waarmee de luchttoevoer naar de pijpen wordt geschakeld zijn ook hier binnenin deze windlade geplaatst. In tegenstelling tot eerdere ontwerpen, gebruikten we hier uitsluitend konische ventielen. Hierdoor wordt het mogelijk ook aftertouch na het aanzetten van een noot te implementeren. Hiertoe wordt de houd-spanning voor de elektromagneten in pulsbreedte gemoduleerd. Het elektronisch principeschema moge dit verduidelijken: Voor de windvoorziening maakten we gebruik van een kleine Ventola orgelblazer van de firma Laukhuff, met een regelbare winddruk van maximaal 80mm waterkolom, of 8mBar = 785 Pa, in eenheden uit de fysika. De aansturing van de 80 Watt motor gebeurt met een motorcontroller. Zoals voorspelbaar en normaal bij orgelpijpen, is ook hier de stemming enigszins afhankelijk van de winddruk. Alleen bij een motor AC frekwentie van 50Hz is de stemming korrekt. Winddruk 70mm H2O. Om een eenvoudige afregeling, stemming en intonering mogelijk te maken, monteerden we een precieze manometer aan de buitenkant van de windlade. Het maximale debiet van de kompressor is 1 kubieke meter, wat dus brede klusters ruimschoots mogelijk maakt.
Voor de bouw van deze automaat maakten we gebruik van een eerder toevallige aanbieding op de website van August Laukhuff, voor een volledig in hout gebouwd 4-voet orgelregister met labiaalpijpen. Dit loopt vanaf midi noot 60 tot en met 91. De pijpen voor de noten 55-59 werden speciaal bijgebouwd. De windlade is, afgezien van het bovenblad waarop de pijpen rusten en waarvoor tropisch hardhout werd gebruikt, geheel vervaardigd uit gelast inox en polykarbonaat, waardoor een transparante windlade kon worden gerealiseerd. (Geheel naar analogie trouwens met de windladen zoals we die eerder al ontwierpen voor <Qt>, <Trump> en <Krum>). De elektromagnetische ventielen waarmee de luchttoevoer naar de pijpen wordt geschakeld zijn ook hier binnenin deze windlade geplaatst. In tegenstelling tot eerdere ontwerpen, gebruikten we hier uitsluitend konische ventielen. Hierdoor wordt het mogelijk ook aftertouch na het aanzetten van een noot te implementeren. Hiertoe wordt de houd-spanning voor de elektromagneten in pulsbreedte gemoduleerd. Het elektronisch principeschema moge dit verduidelijken: Voor de windvoorziening maakten we gebruik van een kleine Ventola orgelblazer van de firma Laukhuff, met een regelbare winddruk van maximaal 80mm waterkolom, of 8mBar = 785 Pa, in eenheden uit de fysika. De aansturing van de 80 Watt motor gebeurt met een motorcontroller. Zoals voorspelbaar en normaal bij orgelpijpen, is ook hier de stemming enigszins afhankelijk van de winddruk. Alleen bij een motor AC frekwentie van 50Hz is de stemming korrekt. Winddruk 70mm H2O. Om een eenvoudige afregeling, stemming en intonering mogelijk te maken, monteerden we een precieze manometer aan de buitenkant van de windlade. Het maximale debiet van de kompressor is 1 kubieke meter, wat dus brede klusters ruimschoots mogelijk maakt.
 De pijpen werden op de windlade gemonteerd in twee rijen overeenkomstig de twee verschillende maten van de pijpvoeten. De elektrische verbinding tussen de windlade en de elektronische besturing erbuiten gebeurt via een luchtdicht afgesloten kabelbundel uitmondend op Weidmueller konnektors. De besturing van <Bomi> komt voor rekening van niet minder dan 4 PIC mikrokontrollers: drie voor elke groep van 14 pijpen en een voor de besturing van de motor, het tremulant ventiel en de lichten. Alle elektronische besturingen, inklusief de voedingen, vonden een plaatsje onder de windlade. Aangezien het gehele pijpwerk uit hout is vervaardigd, is deze robot niet geschikt voor openluchtkoncerten. Ze zijn niet in het minst vocht- of regenbestendig. Bovendien is ook zijn eerder zachte toon, niet voldoende krachtig voor straatgebruik. Als lid van het <M&M> robotorkest vormt hij evenwel een grote verrijking van het orkestraal koloriet.
De pijpen werden op de windlade gemonteerd in twee rijen overeenkomstig de twee verschillende maten van de pijpvoeten. De elektrische verbinding tussen de windlade en de elektronische besturing erbuiten gebeurt via een luchtdicht afgesloten kabelbundel uitmondend op Weidmueller konnektors. De besturing van <Bomi> komt voor rekening van niet minder dan 4 PIC mikrokontrollers: drie voor elke groep van 14 pijpen en een voor de besturing van de motor, het tremulant ventiel en de lichten. Alle elektronische besturingen, inklusief de voedingen, vonden een plaatsje onder de windlade. Aangezien het gehele pijpwerk uit hout is vervaardigd, is deze robot niet geschikt voor openluchtkoncerten. Ze zijn niet in het minst vocht- of regenbestendig. Bovendien is ook zijn eerder zachte toon, niet voldoende krachtig voor straatgebruik. Als lid van het <M&M> robotorkest vormt hij evenwel een grote verrijking van het orkestraal koloriet.
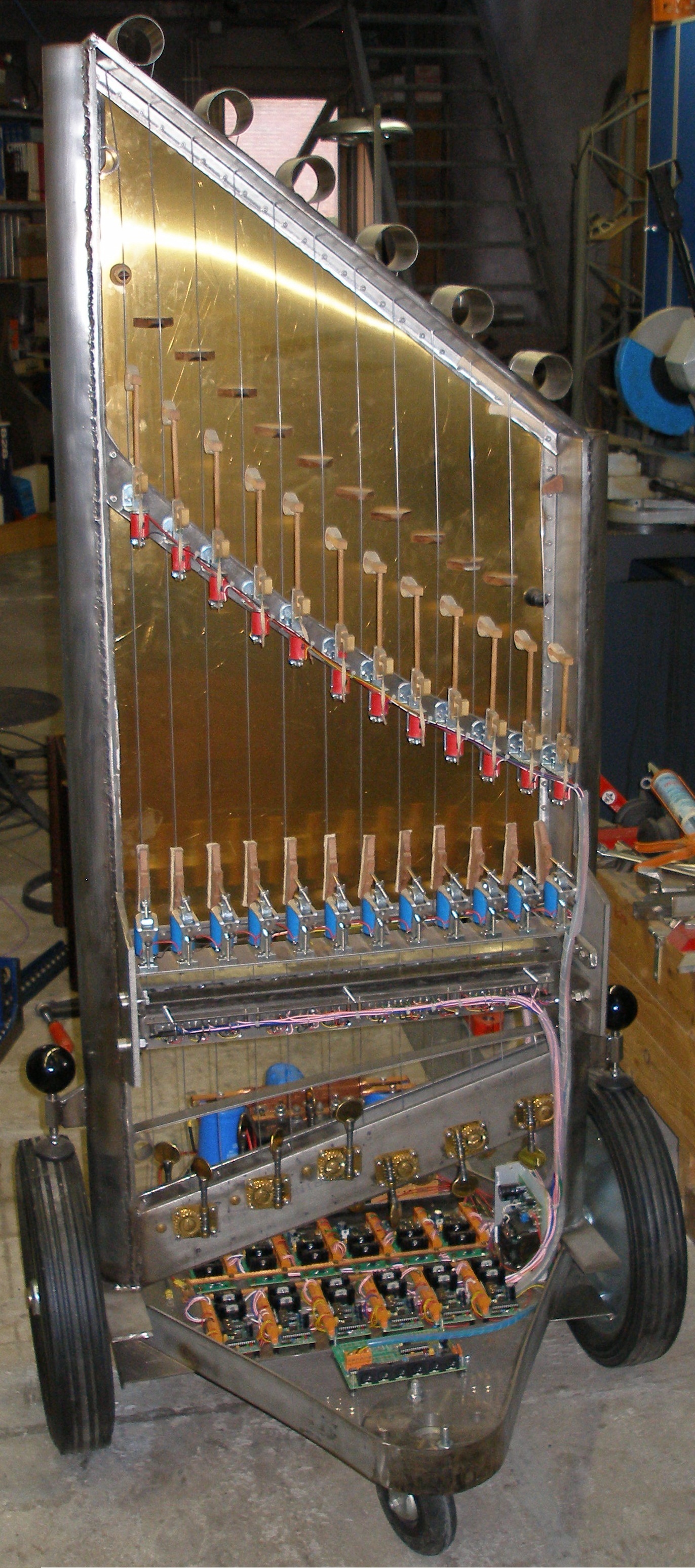 Voor het <M&M> robotorkest hadden we reeds in 2004 een automatisch strijkinstrument gebouwd: <Hurdy>, de automatische draailier. Dat stelde heel wat meer problemen dan aanvankelijk verwacht. Het strijkmechanisme kende dermate veel vrijheidsgraden dat de besturing van deze robot bijzonder ingewikkeld was. Jarenlang hebben we gezocht op betere mechanismen om snaren te strijken met een goede kontrole over de toonvorming. Erg vele experimenten bouwden we op en rekenden we van onder tot boven na. Dat leidde in 2007 tot de definitieve toevoeging van elektromagnetische snaaraansturingen op <Hurdy>, maar meteen ook tot een boel nieuwe ideeen voor potentieel verder te ontwikkelen strijkrobots. Zo kwamen we op de idee een soort 'aeolische' cello te bouwen. Deze robot werd ontworpen met twaalf kromatisch gestemde snaren. Vanaf midi noot 36 tot en met 47. Een toets of een tangentenmechanisme met fretten wilden we niet nog eens gaan bouwen.
Voor het <M&M> robotorkest hadden we reeds in 2004 een automatisch strijkinstrument gebouwd: <Hurdy>, de automatische draailier. Dat stelde heel wat meer problemen dan aanvankelijk verwacht. Het strijkmechanisme kende dermate veel vrijheidsgraden dat de besturing van deze robot bijzonder ingewikkeld was. Jarenlang hebben we gezocht op betere mechanismen om snaren te strijken met een goede kontrole over de toonvorming. Erg vele experimenten bouwden we op en rekenden we van onder tot boven na. Dat leidde in 2007 tot de definitieve toevoeging van elektromagnetische snaaraansturingen op <Hurdy>, maar meteen ook tot een boel nieuwe ideeen voor potentieel verder te ontwikkelen strijkrobots. Zo kwamen we op de idee een soort 'aeolische' cello te bouwen. Deze robot werd ontworpen met twaalf kromatisch gestemde snaren. Vanaf midi noot 36 tot en met 47. Een toets of een tangentenmechanisme met fretten wilden we niet nog eens gaan bouwen.


