Automated Electric bells <Bello>:

Apart from getting the bells and tuning them, this is the easiest problem
to solve. After all, we designed our
'Bellenorgel' already back in 1972... Other than what the score publisher
states (7 different sized bells required) the score prescribes pitches,
notated in the treble staff, and more than 7 bells. Occuring pitches in
the score are: 69, 73,76, 77,78,79,80, 81, 82, 83. This makes 10 bells,
not seven! For the construction of this automaton we generalized the concept
such that we could offer a more continuous range of pitches. Finding suitable
industrial electric bells was not a trivial matter. Moreover, the mechanism
of the bells we got from Infrabel (Funke and Friedland) have a mechanism
using a spring such that the actual hitting of the bell happens at the
release of the electric pulse driving it. This has quite some implications
for the firmware to drive these mechanisms.  Obviously if the pulse lenghts get longer than 10ms, there would be a
noticable latency. The tuning of the bells is possible using a regular
column drill and a clamped file. The ideal tool for doing this is a vertical
lathe, but not too many people do have such equipment available... The
rules are clarified in this little drawing:
Obviously if the pulse lenghts get longer than 10ms, there would be a
noticable latency. The tuning of the bells is possible using a regular
column drill and a clamped file. The ideal tool for doing this is a vertical
lathe, but not too many people do have such equipment available... The
rules are clarified in this little drawing:  The range for tuning is pretty limited. Lowering the pitch can be done
up to a semitone. If you go lower, the sound volume will suffer as the
material gets too thin. Raising the pitch can be done up to a minor third.
Welding on the rim of shell bells made of steel or stainless steel never
gives good results. The bell looses all resonance because of the unavoidable
deformation of the shape.
The range for tuning is pretty limited. Lowering the pitch can be done
up to a semitone. If you go lower, the sound volume will suffer as the
material gets too thin. Raising the pitch can be done up to a minor third.
Welding on the rim of shell bells made of steel or stainless steel never
gives good results. The bell looses all resonance because of the unavoidable
deformation of the shape.
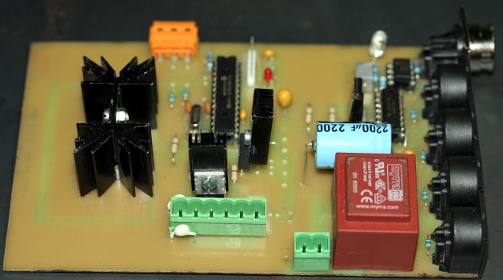
The huh board we designed looks like:  The PCB's for the pulse boards - each board serves 12 bells - looks like:
The PCB's for the pulse boards - each board serves 12 bells - looks like:
The power supply, providing a range of different voltages as required
for the different bell mechanisms is of an utmost simplicity:  As
a continuous current is never drawn in this machine, it's enough to provide
large enough capacitors.
As
a continuous current is never drawn in this machine, it's enough to provide
large enough capacitors.
The note mapping for <Bello> is given under 'midi implementation'
further below. The notes indicated as missing may be added at a later
stage, when we can find suitable dome bells. For the notes 62, 63 and
66 we used U-shaped pieces of steel tuned to the right pitches. These
bells have different sonic qualities as they are not real dome bells.
Users of our robot orchestra that are really in need of the missing lower
bells, can use the bells on our <Llor> and/or <Belly> robots.
For an alternative F# (note 66) the <Harma>
robot includes this one as well. Note that this robot uses mostly bells
from very different origins and of very different composition, hence their
sonic qualities are very different. It was not our intention to create
a homogenous instrument in terms of sound color.
The mapping of midi key pressure commands on note repetition frequency
is given in the following table:
| MIDI key pressure value |
Frequency (Hz) |
Period duration in 24µs units |
|
1
|
.999992000063999
|
41667
|
|
2
|
1.06659840436879
|
39065
|
|
3
|
1.1015350993144
|
37826
|
|
4
|
1.13762536631537
|
36626
|
|
5
|
1.17490036844876
|
35464
|
|
6
|
1.21339196443305
|
34339
|
|
7
|
1.25317052141919
|
33249
|
|
8
|
1.29419682145261
|
32195
|
|
9
|
1.3366267817235
|
31173
|
|
10
|
1.38042229878964
|
30184
|
|
11
|
1.42562242675152
|
29227
|
|
12
|
1.47237240420745
|
28299
|
|
13
|
1.52057027467581
|
27402
|
|
14
|
1.57043067490829
|
26532
|
|
15
|
1.62183903571938
|
25691
|
|
16
|
1.67497454038699
|
24876
|
|
17
|
1.72991225885023
|
24086
|
|
18
|
1.78658205414058
|
23322
|
|
19
|
1.84512738759484
|
22582
|
|
20
|
1.90554590078966
|
21866
|
|
21
|
1.96800806096102
|
21172
|
|
22
|
2.03242118270653
|
20501
|
|
23
|
2.09907640638119
|
19850
|
|
24
|
2.16788067984738
|
19220
|
|
25
|
2.23881933623484
|
18611
|
|
26
|
2.31224565297817
|
18020
|
|
27
|
2.38791143714062
|
17449
|
|
28
|
2.4662128834961
|
16895
|
|
29
|
2.54701795138252
|
16359
|
|
30
|
2.63047138047138
|
15840
|
|
31
|
2.71656452384057
|
15338
|
|
32
|
2.80564720669764
|
14851
|
|
33
|
2.89754288363468
|
14380
|
|
34
|
2.99243512400651
|
13924
|
|
35
|
3.09054047371804
|
13482
|
|
36
|
3.19186966957765
|
13054
|
|
37
|
3.2964135021097
|
12640
|
|
38
|
3.40441757224174
|
12239
|
|
39
|
3.51587770370995
|
11851
|
|
40
|
3.63108206245461
|
11475
|
|
41
|
3.750037500375
|
11111
|
|
42
|
3.87308669517258
|
10758
|
|
43
|
3.99987200409587
|
10417
|
|
44
|
4.13113887236433
|
10086
|
|
45
|
4.26650283295788
|
9766
|
|
46
|
4.40590744069648
|
9457
|
|
47
|
4.55025299406647
|
9157
|
|
48
|
4.69960147379502
|
8866
|
|
49
|
4.8534265191225
|
8585
|
|
50
|
5.01222984081158
|
8313
|
|
51
|
5.17662649604506
|
8049
|
|
52
|
5.34667864322683
|
7793
|
|
53
|
5.52168919515858
|
7546
|
|
54
|
5.70229460334839
|
7307
|
|
55
|
5.88928150765606
|
7075
|
|
56
|
6.08183720138179
|
6851
|
|
57
|
6.28172269963315
|
6633
|
|
58
|
6.48710363796772
|
6423
|
|
59
|
6.69989816154794
|
6219
|
|
60
|
6.91907450459426
|
6022
|
|
61
|
7.14571542902875
|
5831
|
|
62
|
7.37985594521195
|
5646
|
|
63
|
7.62148649472593
|
5467
|
|
64
|
7.87203224384407
|
5293
|
|
65
|
8.13008130081301
|
5125
|
|
66
|
8.39545973537511
|
4963
|
|
67
|
8.67152271938952
|
4805
|
|
68
|
8.95479618883874
|
4653
|
|
69
|
9.24898261191269
|
4505
|
|
70
|
9.55219318355494
|
4362
|
|
71
|
9.86426767676768
|
4224
|
|
72
|
10.1874490627547
|
4090
|
|
73
|
10.5218855218855
|
3960
|
|
74
|
10.867675186924
|
3834
|
|
75
|
11.2218331986713
|
3713
|
|
76
|
11.5901715345387
|
3595
|
|
77
|
11.969740496026
|
3481
|
|
78
|
12.3603282903194
|
3371
|
|
79
|
12.765522875817
|
3264
|
|
80
|
13.1856540084388
|
3160
|
|
81
|
13.6165577342048
|
3060
|
|
82
|
14.0623242209472
|
2963
|
|
83
|
14.523062623446
|
2869
|
|
84
|
14.9988000959923
|
2778
|
|
85
|
15.4894671623296
|
2690
|
|
86
|
16.0010240655402
|
2604
|
|
87
|
16.5212794078773
|
2522
|
|
88
|
17.0625170625171
|
2442
|
|
89
|
17.6254935138184
|
2364
|
|
90
|
18.202999854376
|
2289
|
|
91
|
18.7941662907833
|
2217
|
|
92
|
19.4159676918298
|
2146
|
|
93
|
20.0513314084055
|
2078
|
|
94
|
20.7090788601723
|
2012
|
|
95
|
21.3894592744695
|
1948
|
|
96
|
22.0809044338456
|
1887
|
|
97
|
22.8060572888159
|
1827
|
|
98
|
23.5537968720558
|
1769
|
|
99
|
24.3237984043588
|
1713
|
|
100
|
25.1306795335746
|
1658
|
|
101
|
25.9443752594438
|
1606
|
|
102
|
26.7952840300107
|
1555
|
|
103
|
27.6854928017719
|
1505
|
|
104
|
28.5779606767261
|
1458
|
|
105
|
29.5298842428538
|
1411
|
|
106
|
30.480370641307
|
1367
|
|
107
|
31.4940791131267
|
1323
|
|
108
|
32.5266718709342
|
1281
|
|
109
|
33.5750738651625
|
1241
|
|
110
|
34.6933111296142
|
1201
|
|
111
|
35.8268844941244
|
1163
|
|
112
|
37.00414446418
|
1126
|
|
113
|
38.1912618392912
|
1091
|
|
114
|
39.4570707070707
|
1056
|
|
115
|
40.7697325505545
|
1022
|
|
116
|
42.0875420875421
|
990
|
|
117
|
43.4480361487661
|
959
|
|
118
|
44.8994252873563
|
928
|
|
119
|
46.347793845013
|
899
|
|
120
|
47.8927203065134
|
870
|
|
121
|
49.4266508501384
|
843
|
|
122
|
51.062091503268
|
816
|
|
123
|
52.7426160337553
|
790
|
|
124
|
54.4662309368192
|
765
|
|
125
|
56.2303193882141
|
741
|
|
126
|
58.1125058112506
|
717
|
|
127
|
60.0384245917387
|
694
|
Note that it is very important to decrease the velocity values as the
note repeat frequencies are increased. Not only will the bells not sound
properly, but moreover, there is a high risk of burning out the coils.
The safe maximum value for keypressure is 106. This value guarantees the
duty cycle to be lower than 50%. However, users should not consider this
to be the optimum value. At high repetition rates, the lowest possible
velocity values generally sound best. The highest possible repetition
rate corresponds to that of a 60 Hz American AC driven alarmbell. European
AC driven alarmbells sound at 50Hz. Ordinary AC/DC bells using an interruptor
mechanism have much lower repetition rates. Modern bells have faster repetition
rates (due to their lighter construction) than antique ones. For quite
a few 19th century electric bells, we measured repetition rates as low
as 4 Hz under normal operating conditions.
Here is a picture of the <Bello> robot, ready to be fully suspended
for a performance of Antheil's Ballet Mecanique in the village of Mechelen,
march 2022: 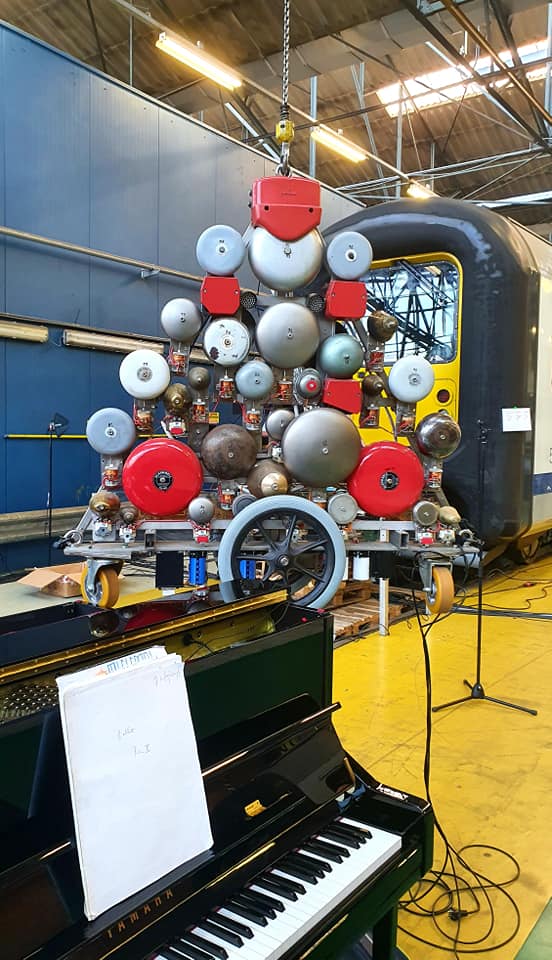
Midi implementation:
- Channel 13
- Note-on commands: the velocity byte steers the force wherewith the
bells are struck:
- Note-Off or Note-on with velo = 0 turns the bell off
- Key-pressure commands are used to set the repetition speed of the
bell strokes. These repetition speeds (cfr. table above) are individually
programmable for each bell. When set to zero, the bells will not repeat
but produce a single stroke. Note that the keypressure commands are
sticky and are memorised for each note.
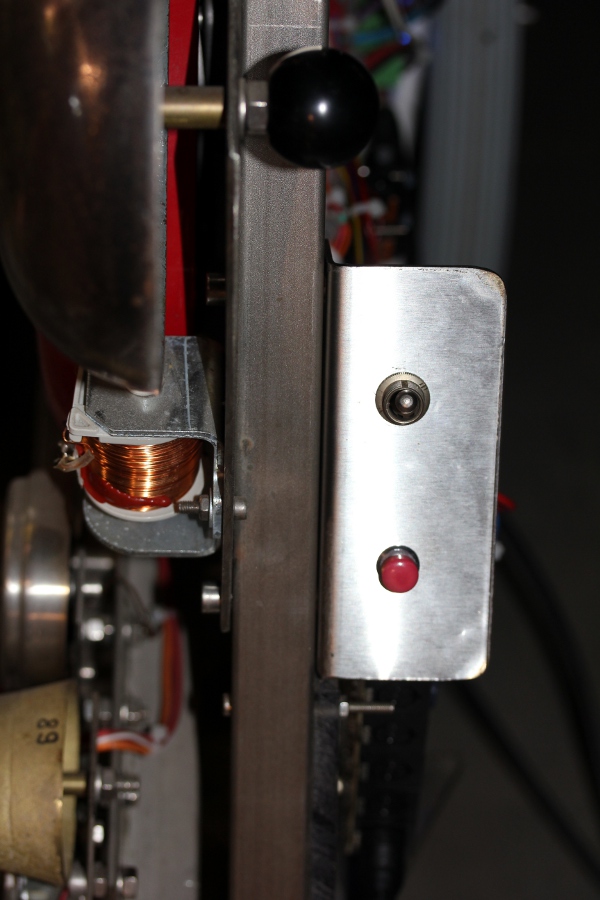
- The two red lights in front are mapped on notes 126 and 127, the velocity
byte steers the flashing speed.
- The red light underneath the front is mapped on note 119, the velocity
byte steers the brightness.
- Controller 30: This controller can be used to set all the repeat frequencies
to one and the same value for all bells. It is a quick way to set the
repetitions rates and an alternative for the key-pressure commands.
However, the time between sending this controller many times should
be kept reasonably long, as it requires reprogramming of all lookup
tables in the firmware. It is advised to send this controller at a time
when no bells are sounding. If this is not done, glitches and irregular
performance may become audible. Note repetition rate is controlled by
the parameter value. To switch repetition off, a zero value should be
send.
- Controller 66: enables (>0) or disables (=0) bell operations. CC66
= 0 resets all keypressure values to zero.
- Controller 123: all notes off, stops all bells, preserving the key
pressure values and thus the repetition rates..
Note: if the robot is left switched
on, it will automatically reset all repeat values and switch all notes
off after 7 hours of operation.
Music
composed for <Bello>:
Godfried-Willem Raes
'Namuda Study #53: Bello', premiered April 22nd 2015 by Dominica Eyckmans
and the author. Performed again with Emilie De Vlam 09.2017.
George Antheil 'Ballet Mechanique', premiered with <Bello> and
the propellers, May 3th 2015, Flanders Festival
Zwevegem / Kortrijk.
Godfried-Willem Raes
'Onmogelijk', a namuda dance production (21,22,23.07.2015) [also uses
the propellers]
Kristof Lauwers 'Study #24', for <Bello>







 We
leave the hole in the 100 x 50 profile open on purpose, as it may help
to produce an airplane sound. Decided to make the entire assembly with
propellers and bells like any other of our musical robots: midi controlled.
The advantage being that we do not have to design a user interface nor
control panel and that remote control using just about any commercialy
available midi controller by a single musician becomes possible. For safety
reasons alone, remote control seems mandatory in this project.
We
leave the hole in the 100 x 50 profile open on purpose, as it may help
to produce an airplane sound. Decided to make the entire assembly with
propellers and bells like any other of our musical robots: midi controlled.
The advantage being that we do not have to design a user interface nor
control panel and that remote control using just about any commercialy
available midi controller by a single musician becomes possible. For safety
reasons alone, remote control seems mandatory in this project. The
power supply should not exceed 100V at 5A. Current limiting should be
designed in.
The
power supply should not exceed 100V at 5A. Current limiting should be
designed in. Test runs
with higher voltages up to 120V. The resonator tube works as predicted.
It could be made longer and we could make a bell for it. Sound level produced
now at 80V is 84dBA.
Test runs
with higher voltages up to 120V. The resonator tube works as predicted.
It could be made longer and we could make a bell for it. Sound level produced
now at 80V is 84dBA. The 500 VA transformer as well as the high voltage electrolytics came
in from Farnell. Thus we can go on with the construction of the power
supply. This is the circuit drawing:
The 500 VA transformer as well as the high voltage electrolytics came
in from Farnell. Thus we can go on with the construction of the power
supply. This is the circuit drawing: 


 And here is a first view on the assembly so far...
And here is a first view on the assembly so far... 

 Visiting the Funke and Huster site, we found out they also have bell shells
with 250 mm diameter. Chances are we can tune these to our missing pitches...
Let's inquire... (www.fhf.de). Also found some large shell (10",
or 250 mm) fire alarm bells on Alibaba.com, in China. We ordered two of
them... wait and see, or better, hear.
Visiting the Funke and Huster site, we found out they also have bell shells
with 250 mm diameter. Chances are we can tune these to our missing pitches...
Let's inquire... (www.fhf.de). Also found some large shell (10",
or 250 mm) fire alarm bells on Alibaba.com, in China. We ordered two of
them... wait and see, or better, hear.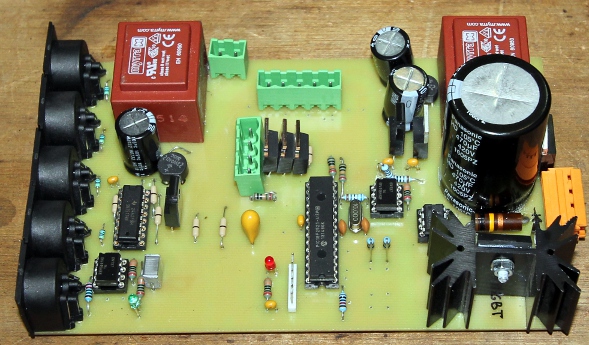

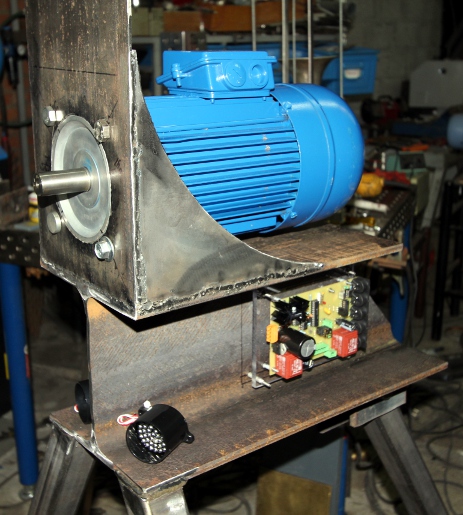
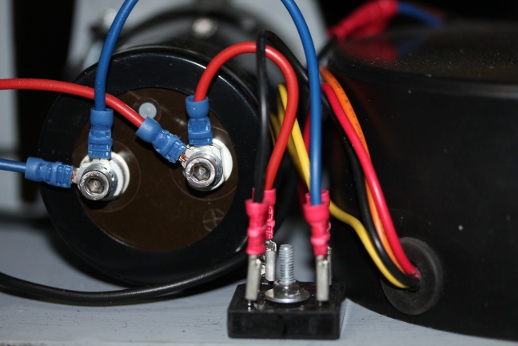
 When
the 12V supply voltage is off, both relays will be off. It looks like
a good solution for the braking circuit on the propeller motors.
When
the 12V supply voltage is off, both relays will be off. It looks like
a good solution for the braking circuit on the propeller motors. We choose an Osram 205 W halogen bulb (not seen on the picture) with a
cold resistance of some 25 Ohms. It is normal by design that this lamp
will never lite up. (It would in fact, if the motor were driven externally
by another motor...). If we had the mounting flange for the propeller,
the robot would be finished now...
We choose an Osram 205 W halogen bulb (not seen on the picture) with a
cold resistance of some 25 Ohms. It is normal by design that this lamp
will never lite up. (It would in fact, if the motor were driven externally
by another motor...). If we had the mounting flange for the propeller,
the robot would be finished now...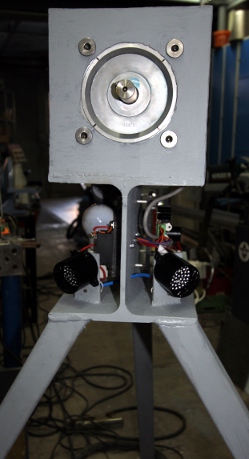
 Also
today two ordered bells came flowing in from China:
Also
today two ordered bells came flowing in from China:  These bells have 250 mm diameter. They are designed to work on 110V ac
current.
These bells have 250 mm diameter. They are designed to work on 110V ac
current. 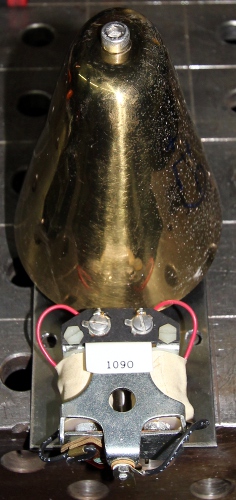 And this one sounds note 65:
And this one sounds note 65: 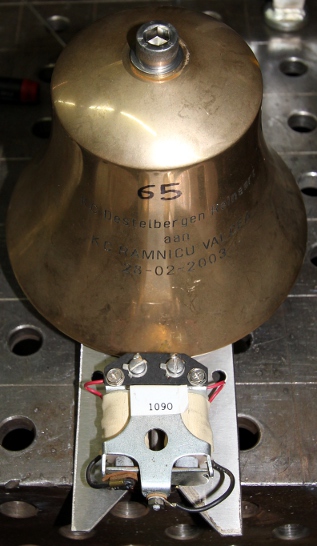 These two bells use a 24V mechanism.
These two bells use a 24V mechanism. Start
construction of the bottom plate (10 mm thick stainless steel plate 1310
mm long, 100 mm wide): drilling of mounting holes for the side wheels,
construction of an axle holder for the front and back wheels, drilling
of mounting holes for the power supply transformers.
Start
construction of the bottom plate (10 mm thick stainless steel plate 1310
mm long, 100 mm wide): drilling of mounting holes for the side wheels,
construction of an axle holder for the front and back wheels, drilling
of mounting holes for the power supply transformers.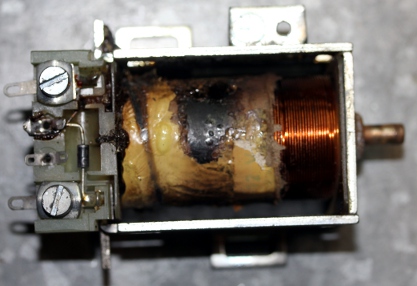 and
82 (a Friedland coil). We have to search of a cause... Also the chinese
bells (notes 57 and 60) refused service. We took them apart for close
inspection and discovered that under the insulating PVC tape covering
one of the coils, a diode was hidden. Also close inspection revealed a
Chinese trick here: the bells are sold to operate on 110V ac, but their
coils are not a pair: one coil measures 248 Ohms and the other coil only
12.6 Ohms... So clearly with a minor wiring change they can sell one and
the same bell for 110V ac and for 6V to 12Vac... The weakness of the construction
though is that the coils giving very unbalanced forces, cause a lot of
unwanted mechanical noise... Bell 81 was not working, due to a typing
error in the firmware. We started making a worksheet in order to figure
out the optimum velocity scalings for the different bells.
and
82 (a Friedland coil). We have to search of a cause... Also the chinese
bells (notes 57 and 60) refused service. We took them apart for close
inspection and discovered that under the insulating PVC tape covering
one of the coils, a diode was hidden. Also close inspection revealed a
Chinese trick here: the bells are sold to operate on 110V ac, but their
coils are not a pair: one coil measures 248 Ohms and the other coil only
12.6 Ohms... So clearly with a minor wiring change they can sell one and
the same bell for 110V ac and for 6V to 12Vac... The weakness of the construction
though is that the coils giving very unbalanced forces, cause a lot of
unwanted mechanical noise... Bell 81 was not working, due to a typing
error in the firmware. We started making a worksheet in order to figure
out the optimum velocity scalings for the different bells. Wiring
redone as the existing wire was molten completely. Everything repaired
by the end of the day. Suitable brass dome found for note 72. Mechanism
constructed, using a 24V coil set.
Wiring
redone as the existing wire was molten completely. Everything repaired
by the end of the day. Suitable brass dome found for note 72. Mechanism
constructed, using a 24V coil set. A full day of work...
And this be nr.8:
A full day of work...
And this be nr.8: 
 The
mechanisms for bells 90 to 93 were modified to work on 12V by connecting
the two coils in parallel. This brings the resistance down to 8.8 Ohm
and the peak current to 1.4A at 12 V. As the duty cycle will allways be
lower than 50% the maximum average current will be 0.7A. Bottom LED light
mounted and mapped on note 120. This can be PWM controlled with the velocity
byte. Bottom row assembly finished and mounted. All firmware adapted and
uploaded to the extra bells. The bottom row can be taken out of the robot,
therefore we used a 12-pole connector.
The
mechanisms for bells 90 to 93 were modified to work on 12V by connecting
the two coils in parallel. This brings the resistance down to 8.8 Ohm
and the peak current to 1.4A at 12 V. As the duty cycle will allways be
lower than 50% the maximum average current will be 0.7A. Bottom LED light
mounted and mapped on note 120. This can be PWM controlled with the velocity
byte. Bottom row assembly finished and mounted. All firmware adapted and
uploaded to the extra bells. The bottom row can be taken out of the robot,
therefore we used a 12-pole connector.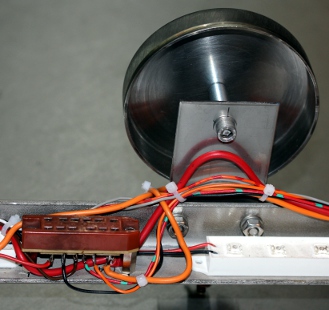 It connects to the main chassis with 4 M6 bolts and nuts. Pulse board
3 now services only 12 V loads. On board 2 we still have two free outputs:
P2.3 and P2.4. This as far as we are now:
It connects to the main chassis with 4 M6 bolts and nuts. Pulse board
3 now services only 12 V loads. On board 2 we still have two free outputs:
P2.3 and P2.4. This as far as we are now:  Demonstration
for Ictus. First testing with the Antheil score material. This is what
it looks like now, nearly finished:
Demonstration
for Ictus. First testing with the Antheil score material. This is what
it looks like now, nearly finished:  And this is what the PCB looks like:
And this is what the PCB looks like:  Hopefully we have the time to etch and solder this before the Antheil
piece goes into production... this weekend. In fact it would be a good
idea to provide some place on the PCB for a simple SMPS 12V power supply,
as this would allow us to mount two red LED spotlights on this propeller
as well...
Hopefully we have the time to etch and solder this before the Antheil
piece goes into production... this weekend. In fact it would be a good
idea to provide some place on the PCB for a simple SMPS 12V power supply,
as this would allow us to mount two red LED spotlights on this propeller
as well...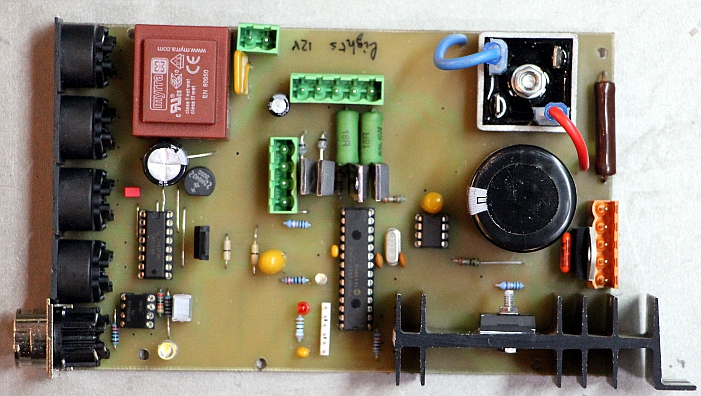
 This bell is mounted
on the backside of the robot.
This bell is mounted
on the backside of the robot.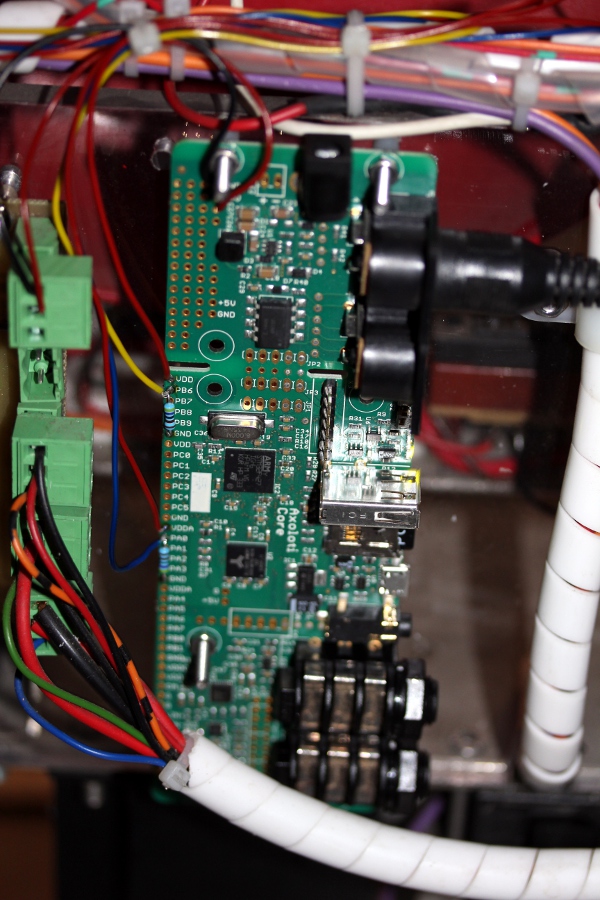
 Firmware for the AXO board written by Lara Van Wynsberghe. The connections
for the Axoloti board look like this:
Firmware for the AXO board written by Lara Van Wynsberghe. The connections
for the Axoloti board look like this: 
{kind=link}
{kind=link}