<Hybrhi>
a top octave electroacoustic pipe organ using membrane driven pipes
Godfried-Willem RAES
2015
|
<Hybrhi> |
<HybrHi>
As the results of the <Hybr> robot turned out
very positive, we decided to give it an extension into the high range of notes.
An extension in the low range would also have been possible, but due to the
inherently large size of the pipes, we at least for now, abandoned the idea.
When working in tandem with <Hybr> - a mother and child configuration
- it becomes possible for the duo to perform a wide range of solo literature.
Learning some lessons from the <Hybr> design, here we strictly adhered
to the design rule stating that the ratio of pipe length to internal diameter
must be larger than 10. However, due to the non availability of pipe material
in gradually increasing internal diameters, the consequence was that for some pipes we
had to build them as 'overblown' pipes, using their second or third overtone.
As we tried to dig up as many different diameter pipes as possible, the pipe
work shows up an assortment of different types (... and colors) of plastics.
All pipes consist of a length of tubing mounted on a base piece in PVC turned
on the lathe, with a conical adapter from speaker membrane diameter to pipe
diameter:  The drawing
shows the principle for 28 mm diameter speakers.
The drawing
shows the principle for 28 mm diameter speakers. In <Hybr> we had used one and the same type of speaker for the
pipes (Visaton K50), here we attempted to let the speaker diameter -in
as far as possible- go down with rising pitch. So we start with
40 mm diameter speakers for note 73 and go down to 16 mm, the smallest
size available on the market. Obviously the resonant frequency of the
speakers goes up with decreasing diameter - for the 16 mm type it's
around 1 kHz- , but in the design of this instrument, we used every
speaker in a range way above this resonant frequency. This way avoiding
the bizarre behaviour of the pipes tuned to frequencies in the
neighbourhood of the resonant frequency of the speakers, as can be
observed in <Hybr>.
In <Hybr> we had used one and the same type of speaker for the
pipes (Visaton K50), here we attempted to let the speaker diameter -in
as far as possible- go down with rising pitch. So we start with
40 mm diameter speakers for note 73 and go down to 16 mm, the smallest
size available on the market. Obviously the resonant frequency of the
speakers goes up with decreasing diameter - for the 16 mm type it's
around 1 kHz- , but in the design of this instrument, we used every
speaker in a range way above this resonant frequency. This way avoiding
the bizarre behaviour of the pipes tuned to frequencies in the
neighbourhood of the resonant frequency of the speakers, as can be
observed in <Hybr>.
Definitive pipes as made, tuned and measured:
| freq | f0 | f1 | f2 | f3 | l/d | L | De | Di | SPL | Spkr | |
| 73 | 554 | 554 | 960 [1.73] | 1443 [2.60] | 1954 [3.53] | 20.51 | 279 | 16 | 13.6 | 87 | K40 |
| 74 | 587 | 587 | 1015 [1.73] | 1475 [2.51] | 1990 [3.39] | 20.25 | 275.5 | 16 | 13.6 | 84 | K40 |
| 75 | 622 | 622 | 1078 [1.73] | 1570 [2.52] | 2175 [3.50] | 18.67 | 254 | 16 | 13.6 | 86 | K40 |
| 76 | 659 | 659 | 1108 [1.68] | 1616 [2.54] | 2250 [3.41] | 17.65 | 240 | 16 | 13.6 | 86 | K40 |
| 77 | 698 | 698 | 1201 [1.72] | 1823 [2.61] | 2552 [3.66] | 18.00 | 216 | 16 | 12 | 78 | K36 |
| 78 | 740 | 740 | 1336 [1.8] | 2645 [3.57] | 3525 [4.76] | 16.83 | 202 | 16 | 12 | 86 | K36 |
| 79 | 784 | 784 | 1376 [1.76] | 2194 [2.8] | 2965 [3.78] | 15.08 | 181 | 16 | 12 | K36 | |
| 80 | 831 | 831 | 1563 [1.88] | 2344 [2.82] | 3720 [3.27] | 13.62 | 163.5 | 16 | 12 | K36 | |
| 81 | 880 | 880 | 1558 [1.77] | 2685 [3.05] | 3329 [3.78] | 11.83 | 142 | 16 | 12 | K36 | |
| 82 | 932 | 932 | 2140 [2.3] | 2833 [3.04] | 3534 [3.79] | 11.5 | 138 | 16 | 12 | K36 | |
| 83 | 988 | 988 | 2511 [2.54] | 3432 [3.37] | 4033 [4.08] | 15 | 135 | 12 | 9 | K36 | |
| 84 | 1046 | 1046 | 1740 [1.66] | 2604 [2.49] | 2911 [2.78] | 13.94 | 125.5 | 12 | 9 | K28 | |
| 85 | 1109 | 1109 | 1930 [1.74] | 2990 [2.7] | 3283 [2.96] | 12.33 | 111 | 12 | 9 | K28 | |
| 86 | 1175 | 1175 |
2329 [1.98] |
2917 [2.48] | 3373 [2.87] | 12 | 108 | 12 | 9 | K28 | |
| 87 | 1244 | 778 | 1244 [1.6] | 2077 [2.67] | 2609 [3.35] | 19.67 | 177 | 12 | 9 | K28 | |
| 88 | 1319 | 793 | 1319 [1.66] | 2226 [2.81] | 3120 [3.93] | 18.61 | 167.5 | 12 | 9 | K28 | |
| 89 | 1397 | 797 | 1397 [1.75] | 2250 [2.82] | 2907 [3.65] | 18.11 | 163 | 12 | 9 | K28 | |
| 90 | 1480 | 823 | 1480 [1.8] | 2496 [3.03] | 2957 [3.59] | 16.06 | 144.5 | 12 | 9 | K28 | |
| 91 | 1568 | 913 | 1568 [1.72] | 2775 [3.04] | 3572 [3.91] | 14.44 | 130 | 12 | 9 | K28 | |
| 92 | 1661 | 847 | 1661 [1.96] | 2636 [3.11] | 2965 [3.5] | 13.78 | 124 | 12 | 9 | K28 | |
| 93 | 1760 | 968 | 1760 [1.82] | 3002 [3.10] | 4331 [4.47] | 13.33 | 120 | 12 | 9 | 90 | K28 |
| 94 | 1865 | 1016 | 1865 [1.83] | 2912 [2.86] | 3750 [3.69] | 13.87 | 111 | 10 | 8 | K28 | |
| 95 | 1976 | 1053 | 1976 [1.88] | 3013 [2.86] | 3510 [3.33] | 12.87 | 103 | 10 | 8 | K28 | |
| 96 | 2093 | 914 | 2093 [2.29] | 2628 [2.88] | 2997 [3.28] | 23.68 | 180 | 10 | 7.6 | 90 | K28 |
| 97 | 2217 | 922 | 1400 [1.52] | 2217 [2.4] | 2666 [2.89] | 21.88 | 166.3 | 10 | 7.6 | 82 | K28 |
| 98 | 2349 | 1105 | 2349 [2.12] | 3758 [3.4] | 4505 [4.08] | 16.53 | 125.6 | 10 | 7.6 | 82 | K28 |
| 99 | 2389 | 2389 | 3535 | 5005 | 14.86 | 113 | 10 | 7.6 | K16 | ||
| 100 | 2437 | 2437 | 3915 | 6488 | 13.35 | 101.5 | 10 | 7.6 | K16 | ||
| 101 | 2794 | 2794 | 4332 | 6095 | 12.03 | 91.4 | 10 | 7.6 | K16 | ||
| 102 | 2960 | 2960 | 4764 | 6621 | 12.97 | 84.3 | 10 | 6.5 | K16 | ||
| 103 | 3136 | 3136 | 5122 | 6240 | 12.22 | 79.5 | 10 | 6.5 | K16 | ||
| 104 | 3322 | 3322 | 5384 | 7457 | 11.53 | 75 | 10 | 6.5 | K16 | ||
| 105 | 3520 | 3520 | 5620 | 6688 | 10.89 | 70.8 | 10 | 6.5 | K16 | ||
| 106 | 3729 | 3729 | 5970 | 6555 | 10.26 | 66.7 | 10 | 6.5 | K16 | ||
| 107 | 3951 | 3951 | 6428 | 7970 | 9.57 | 62.2 | 10 | 6.5 | K16 | ||
| 108 | 4186 | 4186 | 6594 | 8268 | 9.03 | 58.7 | 10 | 6.5 | K16 |
Midi implementation and mapping:
Midi channel: 8 (counting 0-15) [same channel as <Hybr> such that it
can use a same track in sequencer software and be treated as a single instrument.]
Note Off: notes 73 to 108, note release implemented.
Note On: notes 73 to 108, velo implemented.
Lights:
The lights are mapped on the note range 115 to 121. Following lights are mounted now:
Keypressure: used to modulate the pitch of each individual sounding
note. Value=64 gives standard pitch, values 63 to 0 bend the pitch
down, values 64 to 127 bend upwards. The range is 50 cents up or down.
This implementation makes it possible to play the instrument in just
about any imaginable microtuning. The value of the individual note
microtuning settings is 'sticky', thus users do not have to send it
with every note on command. A note-off command will not reset the
microtuning of the corresponding note. This implementation deviates
from standard midi! Before using aftertouch, controller 124 should be
set to value 64 to acquire the right scaling! Once this controller is
set, each note should be initialized with it's right aftertouch. So, if
microtonal inflections within a normal temperament are required, one
should send the note pressure command with value 64 for all the notes
within the range of the instrument prior to any playing commands.
Controllers:
#1: Wind noise or pitch instability. (Default value 0)
#3: Vibrato depth (FM) (default value 0)
#4: Vibrato speed (FM) (default value 0)
#5: Tremolo depth (AM) (default value 0)
#6: Tremolo speed (AM) (default value 0)
#7: Global volume (default value 64)
#16: global attack control (attack time) (default value 1)
#17: global maximum velo amplitude
(default value 127)
#18: global decay time (default value 1)
#19: global release time (default value 1)
#20: Global tuning (range, a quartertone up or down). Default value 64 for A=
440 Hz (*)
#63: Amplitude of the first inharmonic overtone for all
notes 73 to 108. The frequencies appear in the pipe table given above. (Default
value=0)
#66: Power on/off switch. Power off disables
the amplifiers by muting them but does not unpower them. Power off resets all
controllers to their startup default values.
#67: Volume control for the common external audio input (default value 0)
#70: Cold boot and reset controller. Value 0 powers down the robot via the external
boot-board, values > 0 powers the robot up. Wait 1 second after powering
up, before sending any commands.
#113: Amplitude of the second inharmonic overtone
for all notes 73 to 108. The frequencies appear in the pipe table given above.
(Default value= 0)
#123: all notes off, preserving all controller settings including microtuning,
if it was enabled.
#124: initialization of key pressure. In case keypressure is used, this controller
should be set to value 64. Once this controller is set, keypressure for all
notes should be set to 64 for all notes for normal pitch. In case no keypressure
is used, this controller should not be set.
(*) If the tuning is set much different from 440Hz, the overall amplitudes will be affected, unless tuning follows the changes of resonance frequencies as a result of temperature changes. The range is a quartertone up or down. Parameter value 64 equals A=440Hz)
Program Change commands can be used to change the waveform of the excitation. The default is 0, for pure sinusoidal excitation.
Channel aftertouch and pitch bend are not implemented on <Hybrhi>
In addition to the features described before, we implemented
an operational mode wherein the instrument can be used as an acoustic fourrier
transformer with equal tempered frequency bins, extending the range provided
on <Hybr>. Therefore it is required to feed all 36 loudspeakers
with one and the same audio signal, limited in bandwidth (fc= 5000 Hz)
to the range of the instrument. The sampling rate for this channel is pretty
low (>= 10 kS/s) and the resolution is 12 bits. The common audio drive input
requires a low impedance (< 600 Ohm) line level signal. The level of
this signal as presented to the pipes can be controlled with midi controller
#67.
| All specs given here are subject to changes. The instrument became available
for users on February 13th 2015. |
|
Music composed for <Hybrhi>:
Godfried-Willem Raes "Namuda Study #51: Seduction" (2015)
Godfried-Willem Raes "Namuda Study #57: Tekstuur" (2015)
| Back to Logos-Projects page : projects.html | Back to Main Logos page:index.html | To Godfried-Willem Raes personal homepage... | To Instrument catalogue |  |
Construction diary:
18.12.2014: First sketches and outline for a high range extension for the <Hybr>
robot.
19.12.2014: Small diameter speakers made by Visaton traced in the Reichelt catalogue
20.12.2014: PC board designed for a 12-channel amp using STA540 chips. For Hybrhi
we need 2 or 3 of these boards, depending on the range to implement.
21.12.2014: If we use Visaton K28-WP50 speakers, the PVC pieces required if
we make use of Eriks PVC parts become:
- pipes 73-75: diameter 16, 32->20 and 20->16
- pipes 76-87: diameter 12, 32->20, 20->16, 16->12
- pipes 88-96: diameter 10, 32->20, 20->16, 16> 12, 12> 10
As an alternative we can also mill the required conical pieces in the PVC plate.
If we extend the instrument up to note 108, we would require 12 Visaton K16-50
speakers and 8 mm diameter pipes. These would have to be made from brass, as
we cannot find them in PVC.
22.12.2014: Small Visaton speakers ordered from Reichelt.
09.01.2015: The ordered Visaton speakers came in from Reichelt, so the experiments can start again.
14.01.2015: Comparison of the properties of the very small Visation speakers with 50 Ohm impedance:
For the notes 73 (554 Hz) to 78 (739 Hz) Visaton K40 is a possibility.
For the notes 73 (554 Hz) to 84 (1046 Hz) Visaton K36 could be used. Its
resonant frequency is at 550 Hz
For the notes 77 (698 Hz) to 96 (2093 Hz) to Visaton K28 seems possible
Its resonant frequency is at 600 Hz.
For the notes 97 (2217 Hz) to 108 (4186 Hz) Visaton K16 are a good choice. The
lowest possible note for this speaker would be 85 (1108 Hz), just above its
resonant frequency (1005 Hz).
The response curves for these Visaton speakers come from the data sheets from the producer. It will be clear that SPL and efficiency go down with decreasing speaker diameter. The 16 mm speaker produces -8 dB SPL at 1kHz, compared to the 50 mm types.
A possible mensuring, extending the <Hybr> range gradually could thus be:
| note |
frequency |
f1 |
f2 |
speaker diameter / type |
pipe diameter ext./ int. |
physical length |
l/d |
half lambda |
| 73 |
554 Hz |
K40 [40->20 + 20->16] |
16 / 13.6 |
287 |
310 |
|||
| 74 |
587 Hz |
K40 |
16 / 13.6 |
269.5 |
293 |
|||
| 75 |
622 Hz |
K40 |
16 / 13.6 |
253 |
277 |
|||
| 76 |
659 Hz |
1108 |
1616 |
K40 |
16 / 13.6 |
240 |
17.65 |
261 |
| 77 |
698 Hz |
1201 |
1823 |
K36 |
16/ 12 |
216 |
18.00 |
247 |
| 78 |
740 Hz |
1336 |
2645 |
K36 |
16 / 12 |
202 |
16.83 |
233 |
| 79 |
784 Hz |
1376 | 2194 | K36 |
16 / 12 |
181 | 15.08 | 220 |
| 80 |
831 Hz |
1563 | 2344 | K36 |
16 / 12 |
163.5 | 13.62 | 207 |
| 81 |
880 Hz |
1558 | 2685 | K36 |
16 / 12 |
142 | 11.83 | 196 |
| 82 | 932 | 2140 | 2833 | K36 | 16 / 12 |
138 | 11.5 | 185 |
| 83 | 988 | K28 [32->20 + 20->16 + |
12 / 8.5 |
174 |
||||
| 84 | 1046 Hz | K28 | 12 / 8.5 | 165 | ||||
| 85 | 1109 Hz | K28 | 12 / 8.5 | 155 |
||||
| 86 | 1175 | K28 | 12 / 8.5 | 147 |
||||
| 87 | 1245 | K28 | 12 / 8.5 | 138 |
||||
| 88 | 1389 | K28 | 12 / 8.5 | 131 |
||||
| 89 | 1397 | K28 | 12 / 8.5 | 123 |
||||
| 90 | 1480 | K28 | 12 / 8.5 | 116 |
||||
| 91 | 1568 | K28 | 12 / 8.5 | 110 |
||||
| 92 | 1661 | K28 | 12 / 8.5 |
104 |
||||
| 93 | 1760 | K28 | 12 / 8.5 |
98 |
||||
| 94 | 1865 | K28 | 12 / 8.5 |
92.4 |
||||
| 95 | 1976 | K28 | 12 / 8.5 |
87.2 |
||||
| 96 | 2093 Hz | 2997 |
4048 |
K28 [30->10] |
10 / 7.6 |
180 | 23.68 |
82.3 |
| 97 | 2217 Hz | K28 [30->10] | 10 / 7.6 |
166.3 | 21.88 |
77.7 |
||
| 98 | 2349 | 3758 |
4505 |
K28 [30->10] | 10 / 7.6 |
125.6 | 16.53 | 73.3 |
| 99 | 2389 | 3535 | 5005 | K16 - 19->10 | 10
/ 7.6 |
113 | 14.86 | 69.2 |
| 100 | 2437 | 3915 | 6488 | K16- 19->10 | 10
/ 7.6 |
101.5 | 13.35 | 65.3 |
| 101 | 2794 | 4332 | 6095 | K16- 19->10 | 10
/ 7.6 |
91.4 | 12.03 | 61.6 |
| 102 | 2960 | 4764 |
6621 |
K16 - flanged | 10
/ 6.5 |
84.3 | 12.97 | 58.2 |
| 103 | 3136 | 5122 |
6240 |
K16 | 10
/ 6.5 |
79.5 | 12.22 |
55 |
| 104 | 3322 | 5384 |
7457 |
K16 | 10
/ 6.5 |
75 | 11.53 |
51.8 |
| 105 | 3520 | 5620 |
6688 |
K16 | 10
/ 6.5 |
70.8 | 10.89 |
49 |
| 106 | 3729 | 5970 |
6555 |
K16 | 10 / 6.5 |
66.7 | 10.26 |
46.2 |
| 107 |
3951 |
6428 |
7970 |
K16 |
10 / 6.5 |
62.2 |
9.57 |
43.6 |
| 108 |
4186 |
6594 |
8268 |
K16 |
10 / 6.5 |
58.7 |
9.03 |
41.2 |
15.01.2015: Research in catalogues, tracing suitable PVC pipe materials and
connecting pieces.
18.01.2015: Finalizing the design for the 12 channel amplifier boards.
19.01.2015: Using the newly purchased UV-exposure box from Gie-tec, we made the
first PC board for a 12-channel amplifier using STA540 chips. Exposure time
set to 120 seconds. Here is the board design.
 This drawing is
at 200% scale, so for printing it has to be reduced to 50%. Photosensitive PC
board used: FR4, 100x160 mm, order nr. 528560. For the next batch, we better
take 2'15" exposure time and some longer development, as we had some tiny shorts
on the first board etched. The circuit drawing for this board can be found underneath
this page (maintenance instructions). The board layout may be changed for the
next batch.
This drawing is
at 200% scale, so for printing it has to be reduced to 50%. Photosensitive PC
board used: FR4, 100x160 mm, order nr. 528560. For the next batch, we better
take 2'15" exposure time and some longer development, as we had some tiny shorts
on the first board etched. The circuit drawing for this board can be found underneath
this page (maintenance instructions). The board layout may be changed for the
next batch.
20.01.2015: Board soldered. Missing components ordered from Farnell. PC-board
layout improved. Standby monitoring LED added. Board tests completed.
In standby mode, powered from +18 V, the board draws less than 10 mA of current.
In rest-mode, with no signal applied, the current rises to 320 mA. Board layout
corrections applied and a second board exposed, developed and etched. This second
board is dated 20.01.2015 on the PCB. Exposure time was 2'15" this time. A third
board may require some changes again. In total three boards are required if
we stick to a 3-octave version for Hybrhi. Seems we have to be more careful
in removing the protective layer from the photosensitive sides of the boards
prior to exposing: removal of the plastic causes strong electric discharges
causing the film layer to get exposed in spark and stripe patterns! This is
the design used for the second board:
 '
'
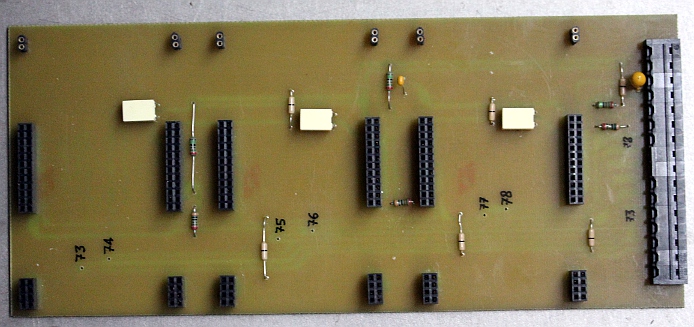
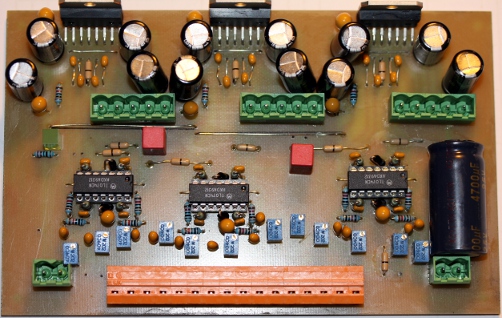
21.01.2015:Parts delivery from Farnell... We can continue soldering. Two 12-channels
amplifier boards ready. One more to go... Here is a picture of the finished
board: 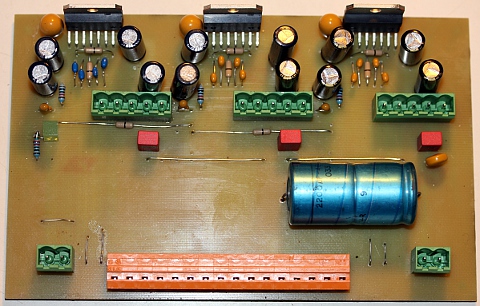 . The latest
version of the PCB layout is now:
. The latest
version of the PCB layout is now:  .
So, now we have amplifier channels ready for a 36 note instrument. Calculations
of the power supply requirements updated. We are still in doubt with regard
to the ambitus to implement. Counting the number of ARM-discovery boards
we still have in stock, 36 notes remain a maximalistic possibility. In
this case we need 9 eurocard boards, each holding two ARM boards. Eight boards,
for 32 notes, looks a bit better but a highest note of g# (midi 104) is awkward.
The minimal solution, extending Hybr up to note 96 only, requires only six Eurocard
boards... Definitely, using 32-bit processors for the octave 96 to 108, is overkill,
but there are many musical advantages to this extension as well. At the other
hand, we risk that the electronics will become by large, the most volume occupying
part in this robot...
.
So, now we have amplifier channels ready for a 36 note instrument. Calculations
of the power supply requirements updated. We are still in doubt with regard
to the ambitus to implement. Counting the number of ARM-discovery boards
we still have in stock, 36 notes remain a maximalistic possibility. In
this case we need 9 eurocard boards, each holding two ARM boards. Eight boards,
for 32 notes, looks a bit better but a highest note of g# (midi 104) is awkward.
The minimal solution, extending Hybr up to note 96 only, requires only six Eurocard
boards... Definitely, using 32-bit processors for the octave 96 to 108, is overkill,
but there are many musical advantages to this extension as well. At the other
hand, we risk that the electronics will become by large, the most volume occupying
part in this robot...
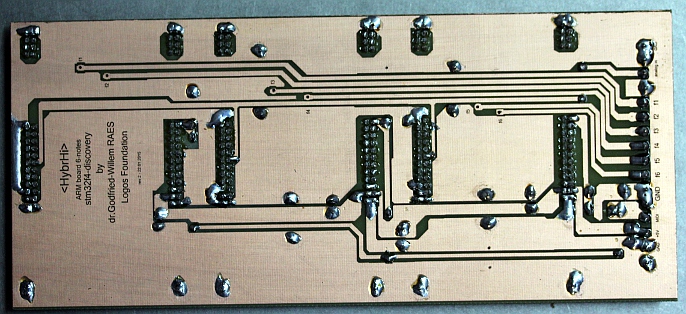
22.01.2015: PCB for the ARM boards redesigned. Now a single carrier board can
hold three ARM-discovery boards, good for six notes. So for full three octaves,
six boards will be required. First board exposed, developed and etched. Result
is perfect now. Here is the PCB design:
 If anyone want to use this
design, download the gif file and print at 25% of original size.
If anyone want to use this
design, download the gif file and print at 25% of original size.
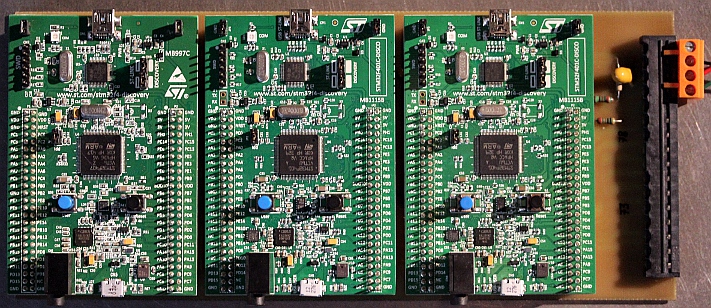
23.01.2015: Circuit drawing updated for the ARM carrier boards:  Here are some pictures of the carrier boards:
Here are some pictures of the carrier boards:
 Audio outputs from the
ARM discovery boards connected with short pieces of stranded wire to the carrier
board. The first board for notes 73 to 78 is ready now for programming and testing.
Two more of these boards exposed, developed and etched...
Audio outputs from the
ARM discovery boards connected with short pieces of stranded wire to the carrier
board. The first board for notes 73 to 78 is ready now for programming and testing.
Two more of these boards exposed, developed and etched...
24.01.2015: Drawing and calculating the mechanics of the complete robot.
Wheels selected: Blickle L-ALST 80K-FI, wheel diameter 80 mm, building height
102 mm with green polyurethane tires and for the central wheels, Tente 200 x30.
Six test pipes made using K16 speakers: note 98 (2349 Hz), note 104 (3322 Hz)
and note 109 (4430 Hz ), and after extrapolation from these, notes 103, 105,
106, 107. These pipes made from transparent PVC with flange, recycled from medical
applicators. We must confess that it is very difficult to tune these pipes to
optimum resonance, as the resonance range is quite large and thus the peak not
very sharp. This remark applies even more strongly with regard the the first
and second overtones.
25.01.2015: Looking at the measurements of the highest seven pipes, and averaging
the f1/f0 and f2/f0 relations, we find 1.6 and 2. This leads us to assuming
these pipes actually resonate on their first overtones.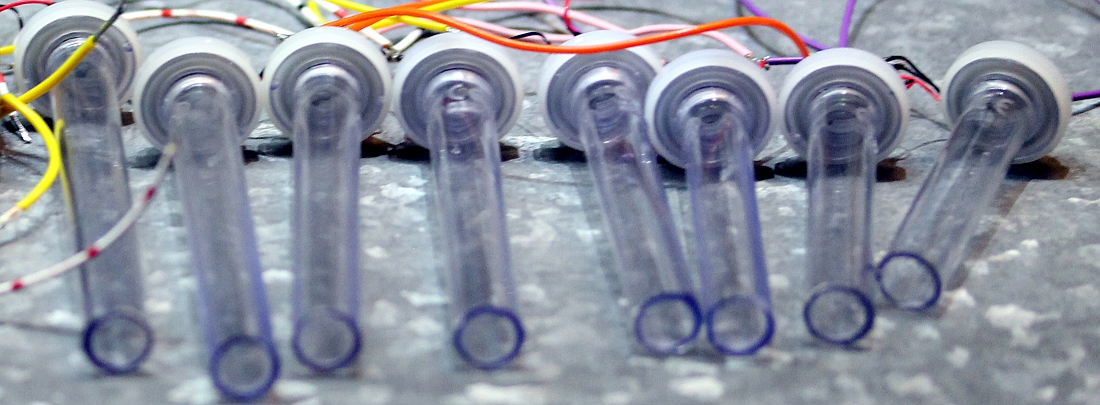 However, at f0/2 - the 'missing fundamental'- no resonance peak could be measured.
Construction of PVC adapters on the lathe: 3 adapters for 10 mm pipe towards
K16 speakers, adapter outer diameter: 19mm. 3 Adapters for 10 mm pipe towards
K28 speakers, adapter out diameter 30 mm, These give acoustical problems though.
We seem the encounter the same kind of discontinuity as in <Hybr>: notes
96 and 97 do not seem to follow the mensuring scale.
However, at f0/2 - the 'missing fundamental'- no resonance peak could be measured.
Construction of PVC adapters on the lathe: 3 adapters for 10 mm pipe towards
K16 speakers, adapter outer diameter: 19mm. 3 Adapters for 10 mm pipe towards
K28 speakers, adapter out diameter 30 mm, These give acoustical problems though.
We seem the encounter the same kind of discontinuity as in <Hybr>: notes
96 and 97 do not seem to follow the mensuring scale.
26.01.2015: Experiments with full-wavelength pipes for notes 96, 97. This
indeed does work, although resonance is no very sharp. We finally decided to
build these pipes as duodecime pipes, so using f= 3 * fo as a tuning base. Construction
of the pipes for notes 73, 74, 75, 76 using Visaton K40 speakers. Construction
of the pipes for notes 77 to 82 using Visaton K36 speakers. The adapter pieces
were turned on the lathe from the leftovers from the holes in the windchest
of Hybr. For pipes 77 to 82 we will used K36 speakers and nylon tubing 16 mm
outer diameter and 1 2 mm inner diameter, as this gives a more gradual scaling.
27.01.2015: More pipes in the making... At the end of the working day, 4 more
pipes to go... For pipes 94 and 95 we could use white PVC tube 10/8. This kind
of tube is used on high voltage neon-signs for wire insulation. Pipe-table updated
with new data. All PC boards exposed, developed, etched and drilled. This job
was done by Mattias Parent.
28.01.2015: Construction of pipes 92, 93. Pipes 94 and 95 seem to become problematic.
All pipes constructed and tuned now... 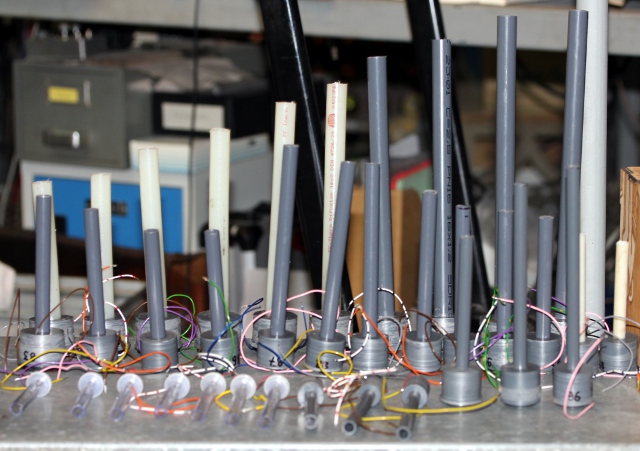 Further
soldering work of the ARM carrier boards. Drawing and designing of the 'windchest'.
Further
soldering work of the ARM carrier boards. Drawing and designing of the 'windchest'.
29.01.2015: Running out of sockets for the ARM boards. Order placed at Reichelt.
Finishing soldering work on the carrier boards in as far as possible. Green
polyurethane wheels ordered from Blickle. Exact sizing determined: The windchest
plate will be 550 mm wide and 200 mm deep. We use 25 mm thick PVC plate, the
same as used on Hybr. The last row of pipes will count 10 pipes, the middle
row 13 pipes and the front row again 13 pipes of the smallest sizes. Start cutting
of the required holes in the windchest plate.
30.01.2015: Further drilling and milling of the holes in the windchest plate.
By the end of the day, this plate was finished. We ruined one the the K16 speakers,
by dropping it... Replacements were already ordered from Reichelt. Start construction
of the chassis, from stainless steel. Mounting plate for the amplifiers on the
backside cut out to 550 mm width, 322 mm height and bend under 90 degrees.
31.01.2015: Preparing the back plate for mounting the power supplies, the midihub
board and the amplifier boards. 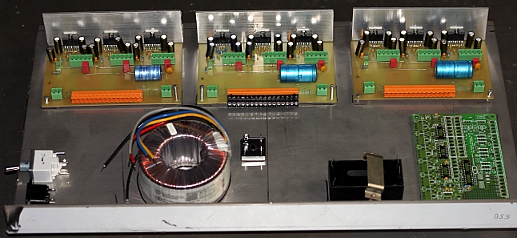 Precision
drilling work at hand. Power supply calculations double checked: indeed we better
stick to a 12 V secondary transformer. Heatsinks made and mounted on the amplifiers.
Precision
drilling work at hand. Power supply calculations double checked: indeed we better
stick to a 12 V secondary transformer. Heatsinks made and mounted on the amplifiers.
01.02.2015: Technical drawings 1:1 scale for the mechanical parts and assembly.
Metal plate work: Front and back panel drilled, sawn and milled. Holding plates
for the side wheels constructed. Lets hope the holes in the mounting plate conform
to the Blickle data sheet, as we do not yet have the wheels... Mounting of components
can start. Tomorrow, a little bit of precision TIG welding... We estimate that
in about one more week, <HybrHi> might play... This is the front side
of the chassis: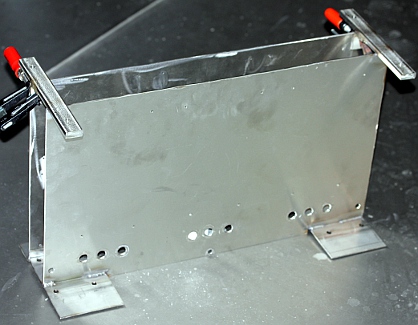
, and here we have the backside: 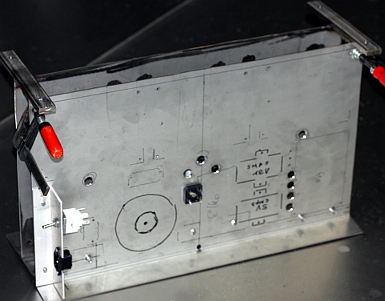 '
'
02.02.2015: Start of the final assembly. Power amp supply (17.2 V DC without
load) and 5V supply wired and tested. Components on the back panel mounted.
We changed the design, such that the back panel can now be removed. Six M6 bolts
hold the panel in place. Front panel welded to the main structure. Wheels tentatively
mounted: they fit!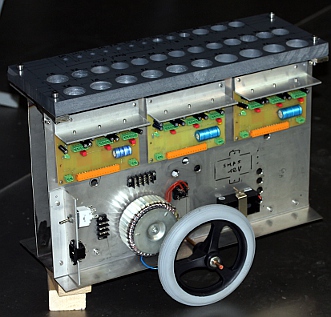
03.02.2014: Waiting for some components to fly in from Farnell, Blickle and
Reichelt. Further wiring of the back- and amplifier side. In the meanwhile,
we could already start mounting the pipes on the windchest plate. All pipes
mounted. Start wiring of the windchest plate. The K16 speakers are a pain in
the ass to solder... The green wheels from Blickle came in, so we mounted the
complete wheelbase. The Traco 12 V 2.5 A smps module came in also and got mounted
right away on the back chassis. Two 12 V tungsten bulbs mounted on the front
of the windchest panel.
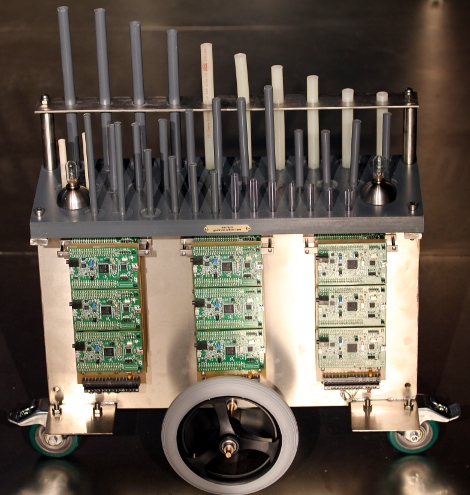
04.02.3015: Mounting nine five-pole IMO or Weidmueller connectors on the wires
from the speaker assembly. Spare K16 speakers as well as dual-row connectors
came in from Reichelt. ARM-carrier board #6 finished. All ARM boards mounted
on the chassis. Here is a preliminary view on mother <Hybr> and child
<HybriHi> about to be born:  Still a lot of wiring and soldering left to be done though.
Still a lot of wiring and soldering left to be done though.
05.02.2015: Soldering of the midihub board.  Start
writing the code for the firmware for the 18F2525 PIC-controller. First version
of the firmware flashed. Mounting of the board on the chassis. Wiring can continue...
Start
writing the code for the firmware for the 18F2525 PIC-controller. First version
of the firmware flashed. Mounting of the board on the chassis. Wiring can continue...
06.02.2015: Dark clouds appearing... It seems we mounted ARM STM32F401 discovery
boards on <HybrHi> whereas on <Hybr> we used ARM STM32F407 discovery
boards. The boards look nearly identical, but there are some differences in
the capabilities of the ARM processors. The STM32F401 runs on a 84 MHz clock
and has 105 DMIPS, the STM32F407 has 168 MHz clock and 210 DMIPS as well as
1 Mbyte flash. We will have to consult Johannes Taelman...
07.02.2015: 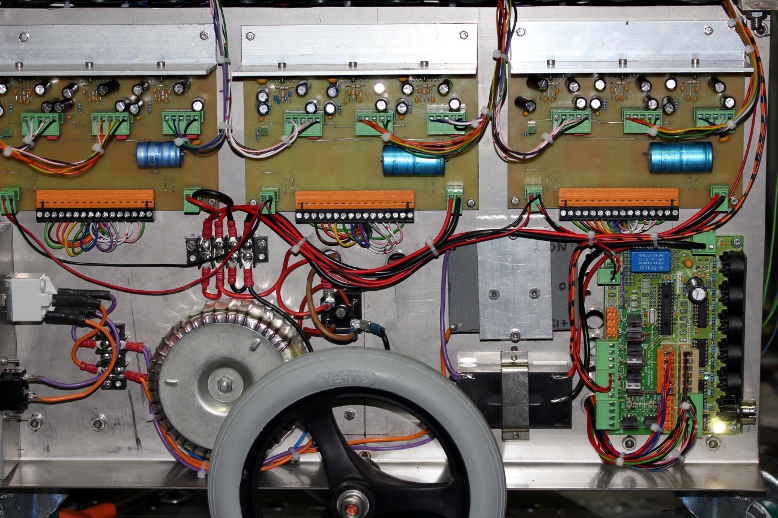 All
wiring finished, except for the audio-input feature. Looks like we will have
to replace all ARM discovery boards despite the fact that it would be possible
to run the required code on the STM32F401. Construction of a pipeholder for
the lowest row of pipes. Turning protective caps in stainless steel for the
E14 lamp sockets. We made two extra of these, to be used on Hybr as well.
All
wiring finished, except for the audio-input feature. Looks like we will have
to replace all ARM discovery boards despite the fact that it would be possible
to run the required code on the STM32F401. Construction of a pipeholder for
the lowest row of pipes. Turning protective caps in stainless steel for the
E14 lamp sockets. We made two extra of these, to be used on Hybr as well.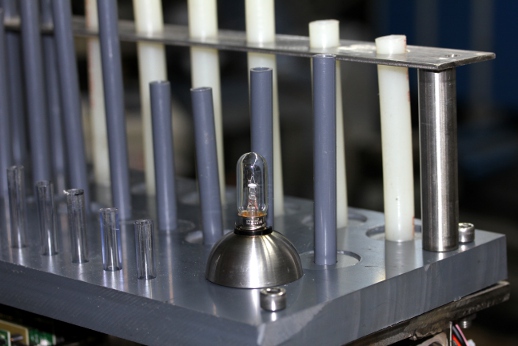
08.02.2015: 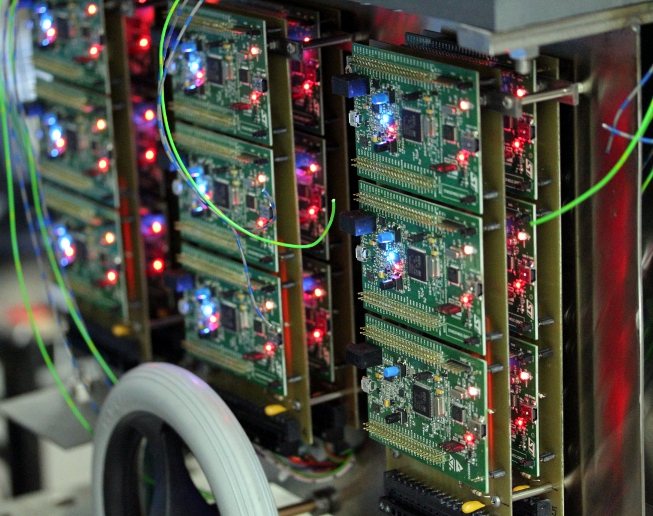 The
extra cost -materials only- for replacing all the ARM boards calculated to be
326 Euro... There remains quite a dissonance in the design of both <Hybr>
and <HybrHi>: somewhere it doesn't sound right that these robots together
use no less than 40 microprocessors, 38 of them 32 bit 168 MHz. There must be
a better way to get this engineered. With processors this fast, it might
be possible to use multiplexing such that a single processor covering an octave
would become possible. We studied the possibilities for an analog solution,
but this turns out just about as complicated and bulky as the massive attack
with microprocessors applied here...
The
extra cost -materials only- for replacing all the ARM boards calculated to be
326 Euro... There remains quite a dissonance in the design of both <Hybr>
and <HybrHi>: somewhere it doesn't sound right that these robots together
use no less than 40 microprocessors, 38 of them 32 bit 168 MHz. There must be
a better way to get this engineered. With processors this fast, it might
be possible to use multiplexing such that a single processor covering an octave
would become possible. We studied the possibilities for an analog solution,
but this turns out just about as complicated and bulky as the massive attack
with microprocessors applied here...
09.02.2015: All ARM STM32F401 board replaced with STM32F407 boards. Two K16
speakers replaced as their 0.2 mm wires broke off... It's a torture for our
eyes. Red LED strip added on the front panel... we had no more white strips
in stock. Also, these strips are not self-adhesive, so we used doubled sided
sticky tape for mounting.
10.02.2015: <Hybrhi> fully implemented in GMT. Start construction of a
polycarbonate front panel 550 mm x 300 mm, with cut out for the wheel. Kristof
Lauwers can start loading up the firmware.
11.02.2015: Test coding for different tunings written in GMT whilst Kristof
is writing and uploading Axoloti firmware. Audio input circuit calculated and
designed:  HybrHi
plays its very first notes... 12dB too soft, as compared to Hybr. White LED
strip added to the front panel, mapped on note 118.
HybrHi
plays its very first notes... 12dB too soft, as compared to Hybr. White LED
strip added to the front panel, mapped on note 118.
12.02.2015: Firmware upload and programming session with Kristof Lauwers. Note
82 did not sound: there was an internal break in the gray wire connecting the
loudspeaker on the windchest panel. The board for note 89-90 seems to be stubborn
for some reason... Checking revealed a bad solder joint on the midi input on
the carrier board. After resoldering, still note 89 refuses to sound. The signal
is available though on the mini-jack connector on the board. So there is nothing
wrong with the patch. We have to clear this out. A wiring issue we suppose.
All other notes do sound, but there are still some mapping bugs in the firmware.
13.02.2015: Corrections in the mappings of the patches by Kristof Lauwers. Fault
in the note 89 not playing found: an interrupted copper trace on the second
amplifier board. All notes are sounding now, so HybrHi can play in full. Balancing
of note volumes still to be improved. Hybr and Hybrhi implemented in the GMT
Midi-player.
14.02.2015: As the maximum output signal level from the ARM boards is only marginally
large enough for driving our amplifier design (+6bB max. input) we designed
a new amplifier circuit with some gain using op-amps and a trimpot on the twelve
inputs. We will not in the near future replace the boards, but for any new design
we would certainly use the newer boards. Here is the PCB for the new design:
 The op-amps to be used are
TLO84's. The trimpot's are Bourns 2k2 miniature 12-turn types. Here is the complete
circuit diagram:
The op-amps to be used are
TLO84's. The trimpot's are Bourns 2k2 miniature 12-turn types. Here is the complete
circuit diagram:
15.02.2015: Discussing possible improvements with Kristof Lauwers. To overcome
the amplitude gap between Hybr and HybrHi we could implement a controller (say
#8) in order to controll the volume setting on Hybrhi as a supplement to the
value set by volume controller #7. Waiting for 150mH coils from Farnell in order
to finish the audio-input board.
17.02.2015: <HybrHi> makes its first public appearence in the Seduction
concert production with the Logos Robot Orchestra. First piece it played: Ludwig
van Beethoven...
18.02.2015: Audio input board finished and tested. 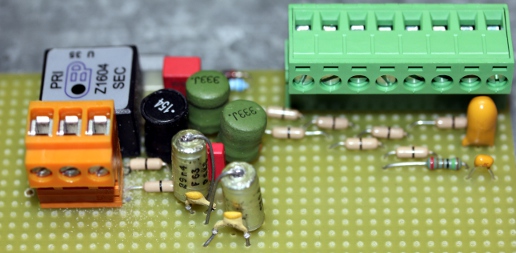 Further
measurements on Hybrhi reveal that the ARM-boards must still have a bug: notes
73,74 give 2.7 Vrms at the loudspeaker output, notes 75,76 five only 1.2 V...
Notes 77,78 give 2.7 V again... With some number shifts in the Axoloti patches
we could fix it, but it remains strange behaviour. Also, the volume curve in
Axoloti seems pretty odd and in any case pretty far off from the logarithmic
curve we would expect to get for a volume control. In any case, with output
voltages of 2.7 V, we remain on the safe side for the speakers as the power
is limited to 145mW.
Further
measurements on Hybrhi reveal that the ARM-boards must still have a bug: notes
73,74 give 2.7 Vrms at the loudspeaker output, notes 75,76 five only 1.2 V...
Notes 77,78 give 2.7 V again... With some number shifts in the Axoloti patches
we could fix it, but it remains strange behaviour. Also, the volume curve in
Axoloti seems pretty odd and in any case pretty far off from the logarithmic
curve we would expect to get for a volume control. In any case, with output
voltages of 2.7 V, we remain on the safe side for the speakers as the power
is limited to 145mW.
19.02.2015: The only hypothesis to explain the volume difference between the
boards that remains is a hardware revision on the Discovery boards themselves.
Must be the design around the CS43L22 DAC audio driver with class D speaker
driver.
23.02.2015: First prototype board for the 12-channel amp with preamps finished:
 Some minor corrections
on the PCB were needed and have been applied to the film for future boards.
Some minor corrections
on the PCB were needed and have been applied to the film for future boards.
09.12.2015: HybrHi went off to the AB in Bruxelles for a concert with Kristof
Lauwers. The first time it gets on the road...
12.02.2016: One of the speakers got loose from a pipe. The PVC glue is clearly
not strong enough. Reglued and we will see whether it holds or not. If not,
we may have to design clamps for these speakers.
26.09.2016: <HybrHi> transported to Berlin for participation in the 'Wir
sind die Roboter' Festival.
03.10.2016: <HybrHi> returned in perfect working condition from the trip
to Berlin. The only issue is that the wheel axle was found to be bend a bit.
Its made from bronze, as we didn't have hardened steel in stock at the time
of construction. Eventually we will have to replace this part.
30.07.2017: Tuning problems, similar to those in Hybr. (documented there).
06.12.2017: Right side 12V/15W tungsten bulb found burned out. Bulb replaced.
25.02.2020: To solve the tuning problem, we designed a boot-board, serving Hybr
as well as HybrHi. Here is the circuit: This design gave us the chance to implement a few new features. Documentation
will follow in the near future.
This design gave us the chance to implement a few new features. Documentation
will follow in the near future.
27.02.2020: Firmware for the <Booter> is up and running. Version 1.0.
01.03.2020: Further documentation on the booter device
is available on its own page.
01.03.2022: Hybrhi speelt mee in Ukiyo-E, Handelsbeurs Gent.
04.06.2022: <HybrHi> op reis naar Eupen, Schlachthaus voor de Black Robots
produktie.
05.06.2022: Herstelling (vervanging) van de PREH DIN konnektor voor de MIDI
ingang. Nieuwe konnektor vastgezet met epoxy hars.
14.09.2023: <HybrHi> mee met het orkest naar de Deutsche Oper in Berlijn.
27-28-29.09.2023: Uitvoeringen van de Zeroth Law produktie in de Tischlerei.
02.10.2023: <HybrHi> komt heelhuids terug aan in Gent en vervoegt opnieuwe
het robotorkest.
TO DO:
Mounting polycarbonate protective back plate.
Evaluation
Replacing the power amps with the newest design.
Maintenance information:
Circuit diagrams:
ARM-boards and audio amplifiers:
ARM-boards: (size: 100 x 240)
Weidmueller connector pinning:
The ARM boards are almost identical to the ones used for <Hybr>, however in this robot they are sandwiched in a stack rather than mounted on a plane. The audio amplifiers are a new design using the STA540 chips:
Power supply circuit:
Midihub board:
Wired board:
Firmware for the PIC microprocessor on
this board.
Hex-dump of the assembled code
Audio input circuit with high and low pass filter:
Measured behaviour: -6 dB at 800 Hz, 0 dB between 1 kHz and 4.3 kHz, -6 dB at 4.4 kHz. The maximum input signal before (negative) clipping occurs is 2 Vpp for an output signal of 1.1 Vpp measured in the passband.
Prototype board:
by Godfried-Willem Raes
Further reading on this topic (some in Dutch):
Audsley, George Ashdown 'The Art of Organ-Building', ed. Dover Inc, NY,1965,
(first edition: 1905) ISBN 0-486-21314-5
D'Appolito, J. 'Luidspreker-meettechniek', ed. Segment BV, Beek , Nederland,
2000, ISBN: 90 5381 116 8
De Keyser, Ignace, 'Challenging
von Hornbostel & Sachs', in: 50 years at Logos, 2019
Raes, Godfried-Willem , Expression
control in musical automates
Taelman, Johannes 'AXOLOTI development platform' (Hasselt, 2014)
Maintenance and disassembly instructions:
Before undertaking any repair on this robot we strongly advise to first read
through our construction diary, as this will clarify fully how the machine was
originally designed and assembled.
To upgrade the firmware in the ARM-processors, or to repair any
boards on the front side the transparent protective cover should be
removed. To remove the middle board assembly, the wheel should be
removed as well.
Robody picture with <Hybrhi>:

[EOF]